Descripción
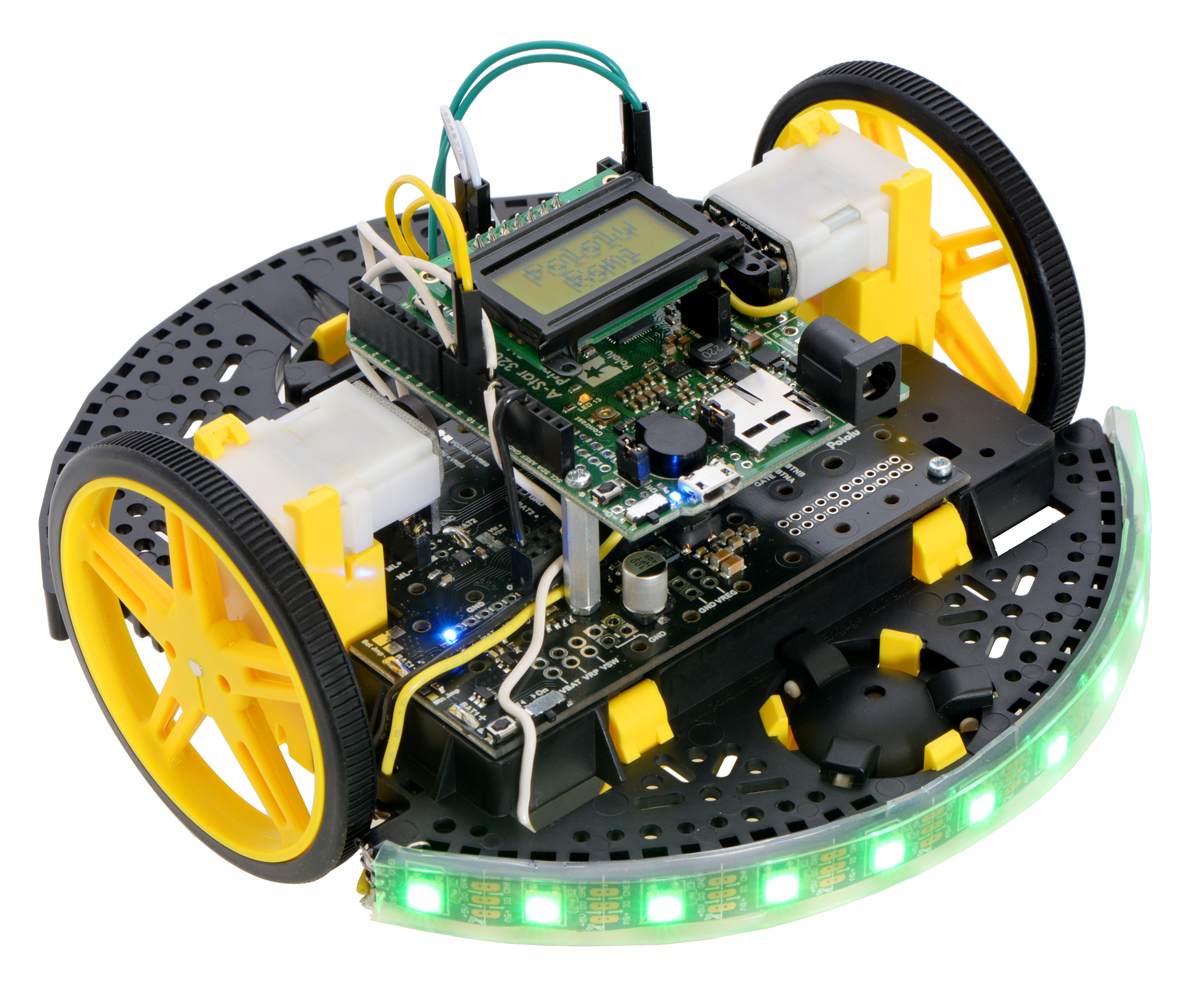
Use este controlador de motor y placa de distribución de energía para que su chasis Romi funcione rápidamente. Ofrece todas las mismas características que las más pequeñas Tablero de distribución de energía para Romi Chassis — ranuras de contacto de batería, protección contra voltaje inverso, varias opciones de conmutación de potencia, y fácil acceso a los diversos buses de energía — y agrega un controlador de motor de dos canales y un potente regulador reductor de conmutación que puede suministrar un continuo 2.5 A a 5 V o 3.3 V. Simplemente agregue un microcontrolador y sensores para completar su robot Romi.
Resumen
Este controlador de motor y placa de distribución de energía está diseñado específicamente para Chasis Romi como una forma conveniente de conducir los motores del chasis y alimentar el resto de la electrónica que conforman su robot. Cuenta con dos controladores de motor DRV8838, uno para cada uno de los motores del chasis y un potente regulador reductor que puede suministrar 2.5 A continuos a 5 V o 3.3 V. La placa tiene ranuras para soldar en las pestañas de contacto de la batería del chasis Romi e incorpora la funcionalidad de conmutación y distribución de energía de Tablero de distribución de energía para Romi Chassis, por lo que ofrece todas las mismas características: protección contra voltaje inverso, varias opciones de conmutación de potencia basadas en el circuito de enclavamiento patentado desde el Interruptor de alimentación del botón Pololu, y fácil acceso a los diversos autobuses eléctricos.
La placa tiene un pequeño botón ya instalado para controlar la alimentación ( un empuje enciende la alimentación y otro empuje lo apaga ) y ofrece puntos convenientes para conectar el botón externo o los interruptores táctiles paralelo. También ofrece varias opciones alternativas de conexión de botón que dan como resultado una operación de solo pulsación o solo de empuje, y entradas adicionales permiten más opciones de control de potencia, como permitir que su robot apague su propia potencia. Alternativamente, la placa se puede reconfigurar para deshabilitar el circuito del botón y dar control al pequeño interruptor deslizante instalado.
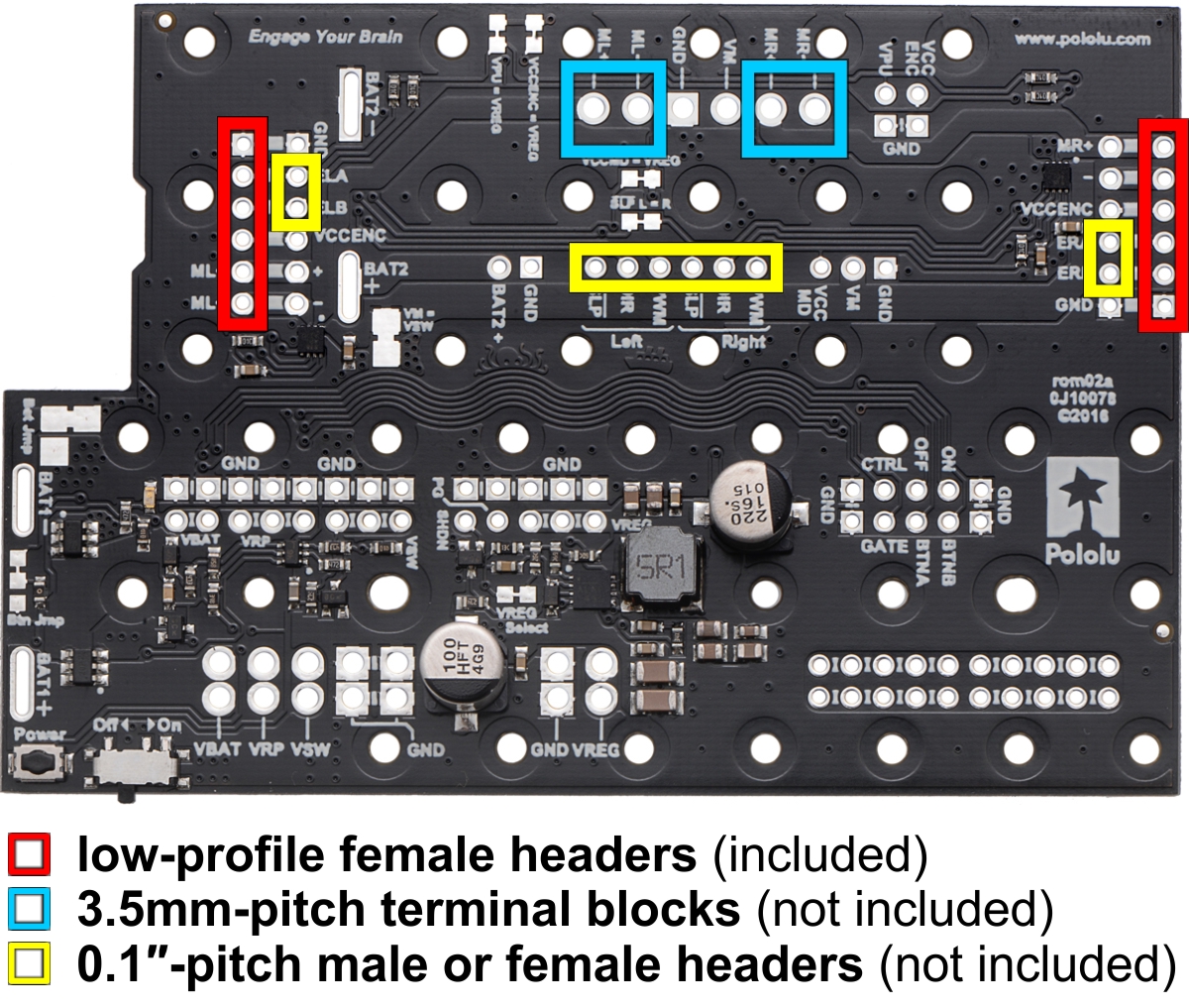
Se puede acceder a los pasadores de control y los buses eléctricos de la placa a través de un conjunto de pasadores espaciados de 0.1 ″ que son compatibles con el estándar 0.1 ″ macho y Encabezados femeninos de 0.1 ″, y los buses eléctricos también son accesibles a través de un conjunto más grande de agujeros que son compatibles con bloques de terminales de paso de 3.5 mm (, puede combinar un Bloque de 2 pines y un Bloque de 3 pines en un solo bloque de 5 pines que abarca los tres orificios de alimentación y dos orificios de tierra ).
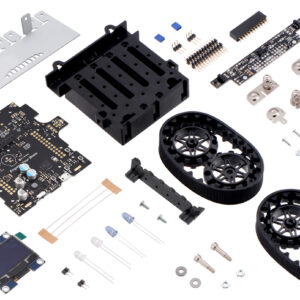
Dos 1/4 ″ # 2-56 tornillos y dos #2-56 nueces están incluidos para montar la placa en el chasis Romi, y se incluyen dos cabeceras femeninas de bajo perfil para conectar los motores a la placa.
Usando el tablero
Instalación
|
|
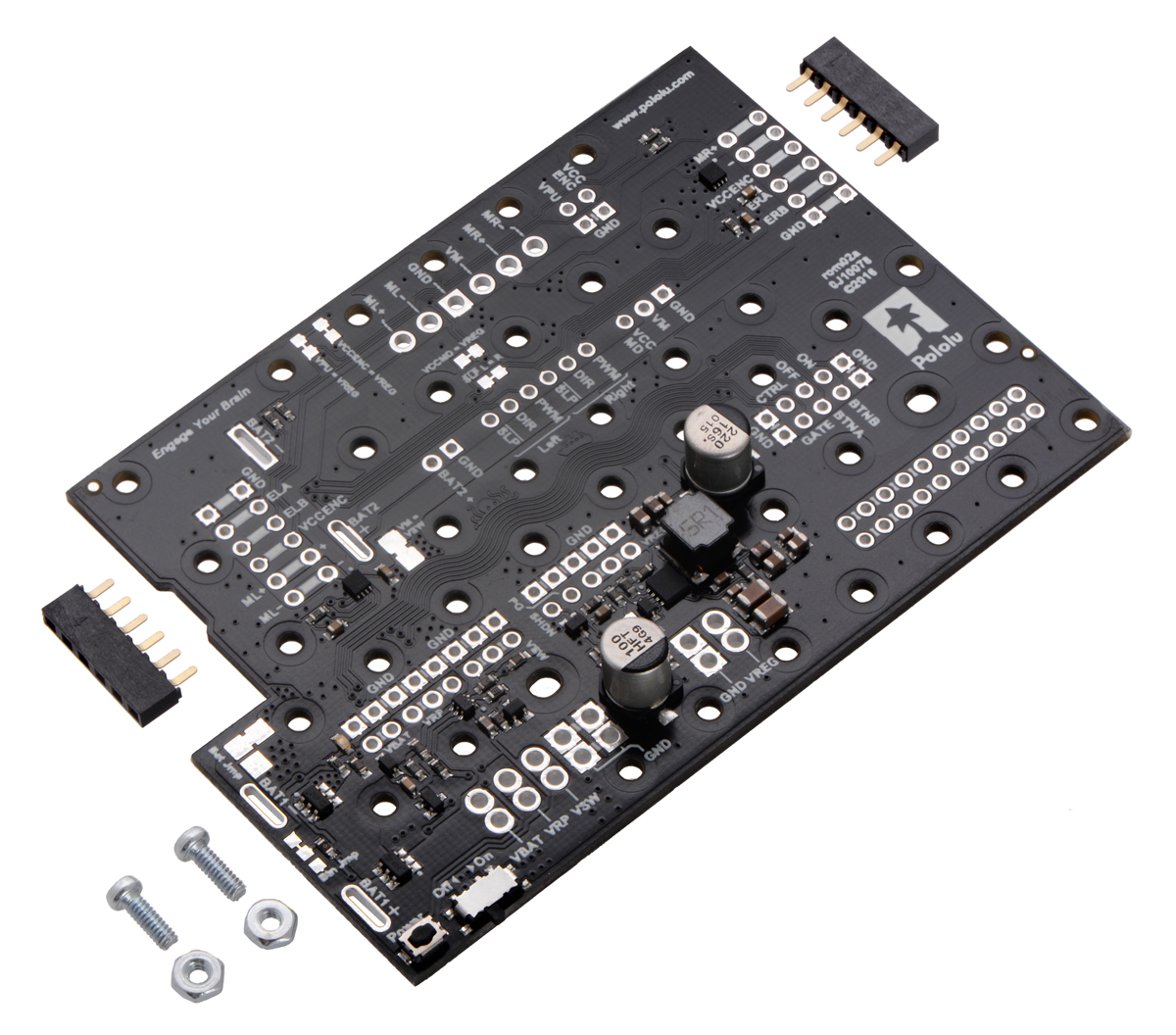
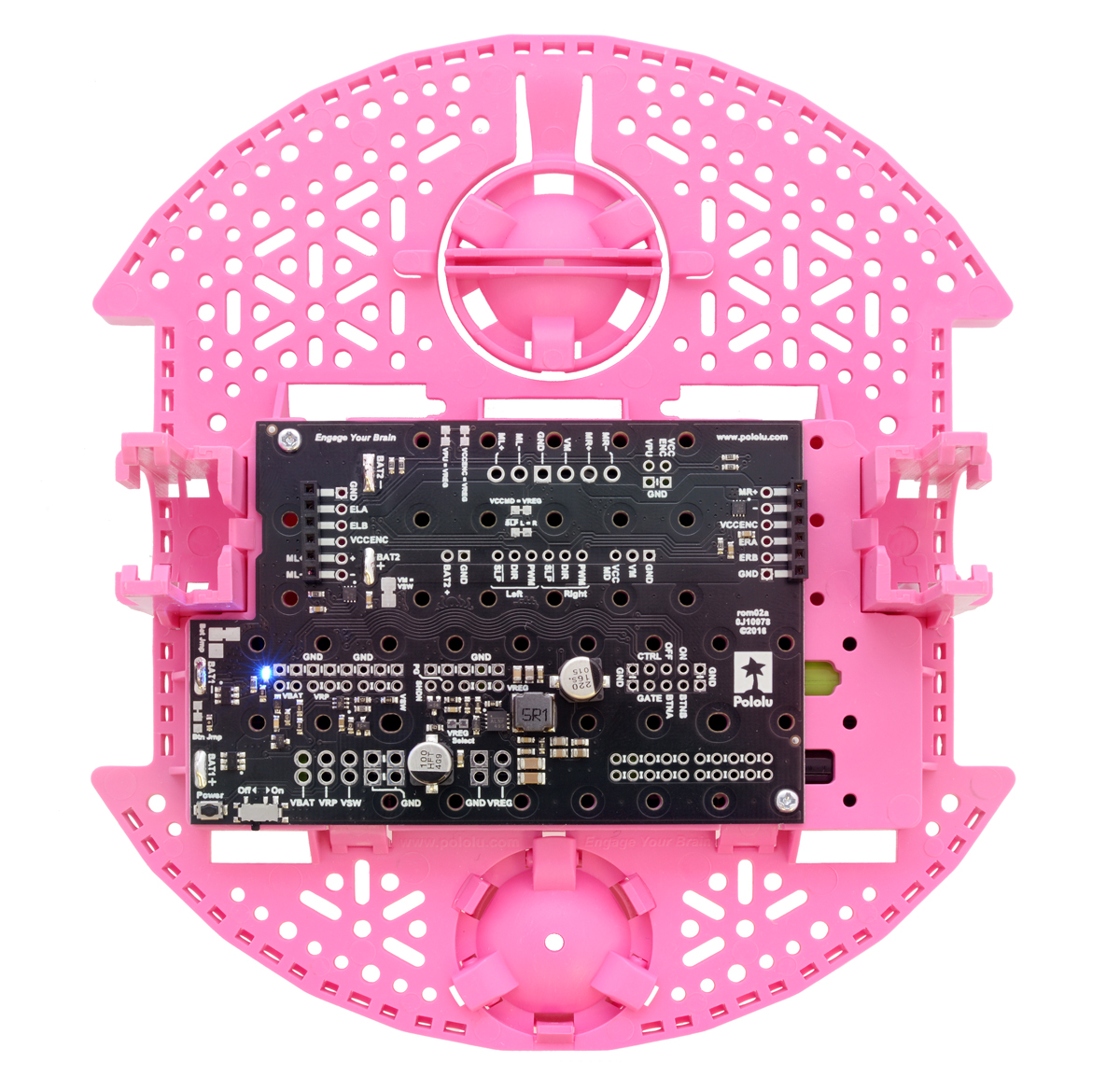
Antes de instalar el controlador del motor y la placa de distribución de energía en un chasis Romi, debe soldar los encabezados, bloques de terminales, cables u otros conectores que planee usar en la placa. Tiene algunas opciones para conectar los motores del chasis Romi a la placa:
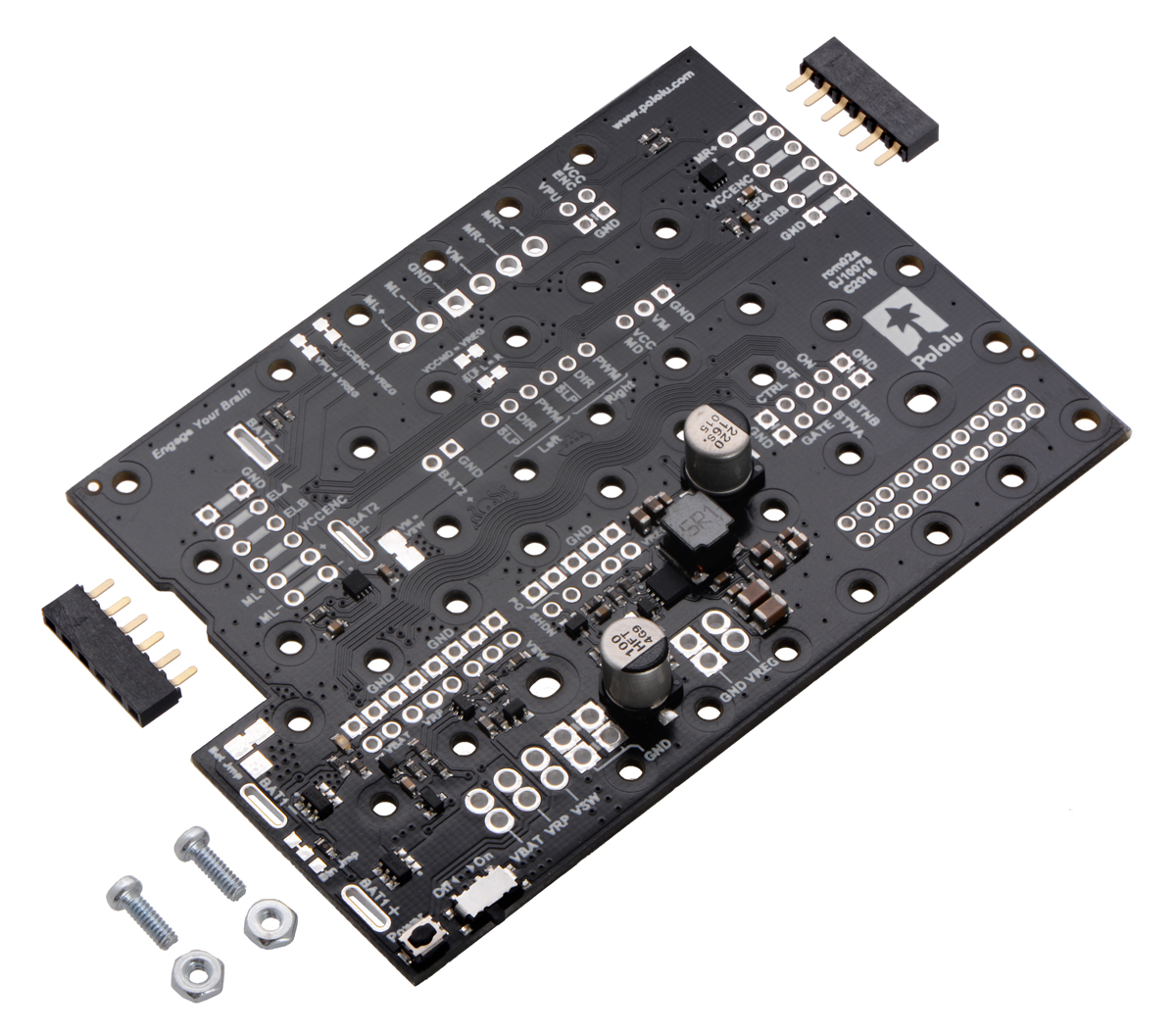
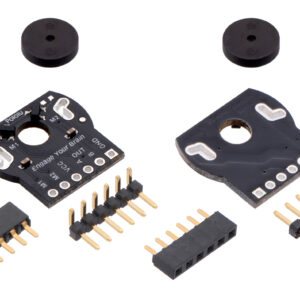
- Si planeas usar el Romi Encoder Pair Kit con sus motores, le recomendamos que suelde estos encabezados femeninos incluidos en los conjuntos externos de agujeros ( más cercanos a los bordes de la placa ) directamente debajo de donde estarán los motores. Con los codificadores Romi montados en sus motores y sus pasadores de cabezazo macho incluidos instalados hacia abajo, se conectarán directamente a estos encabezados hembra cuando empuje los motores a las pinzas del motor.
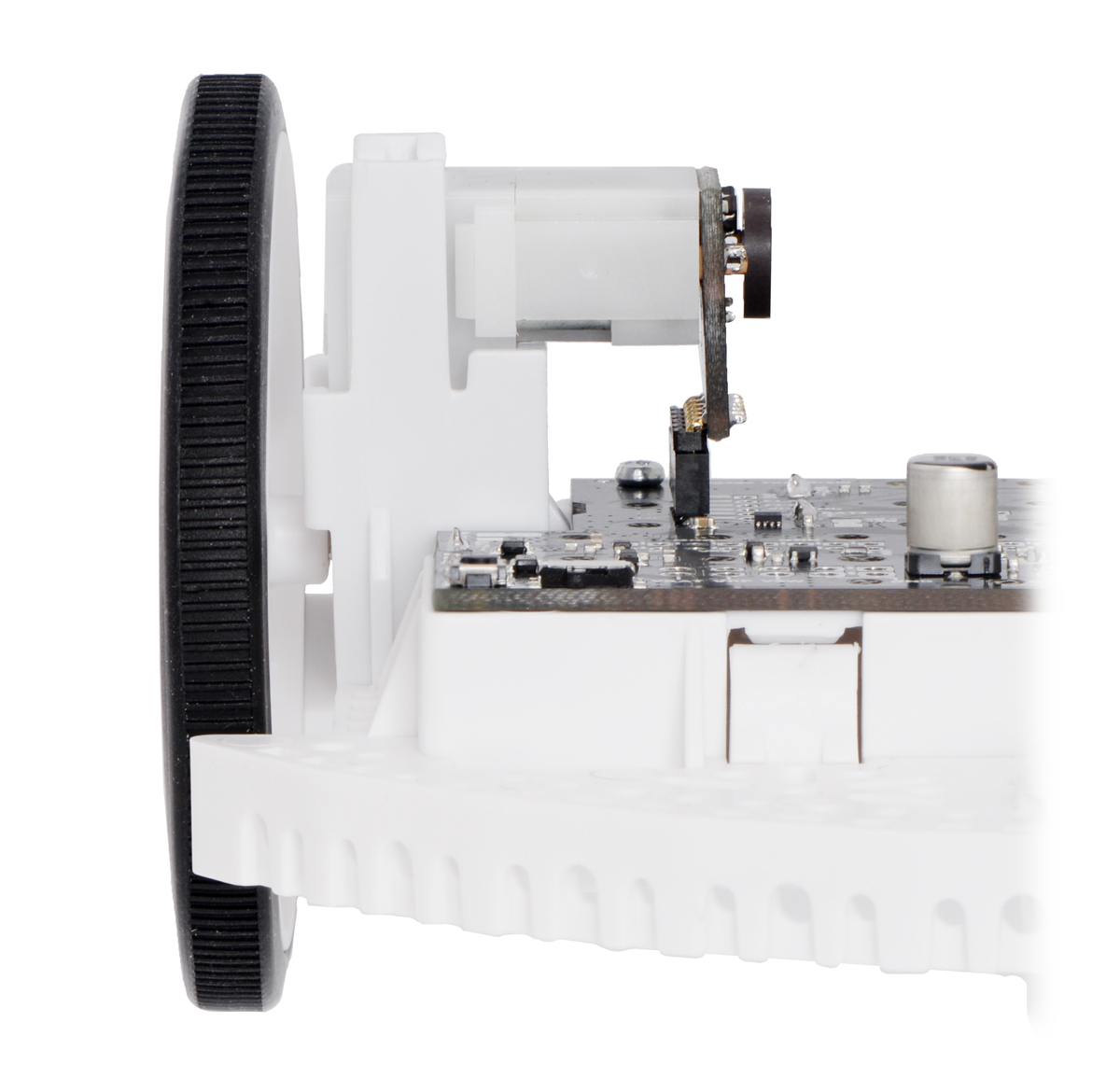 |
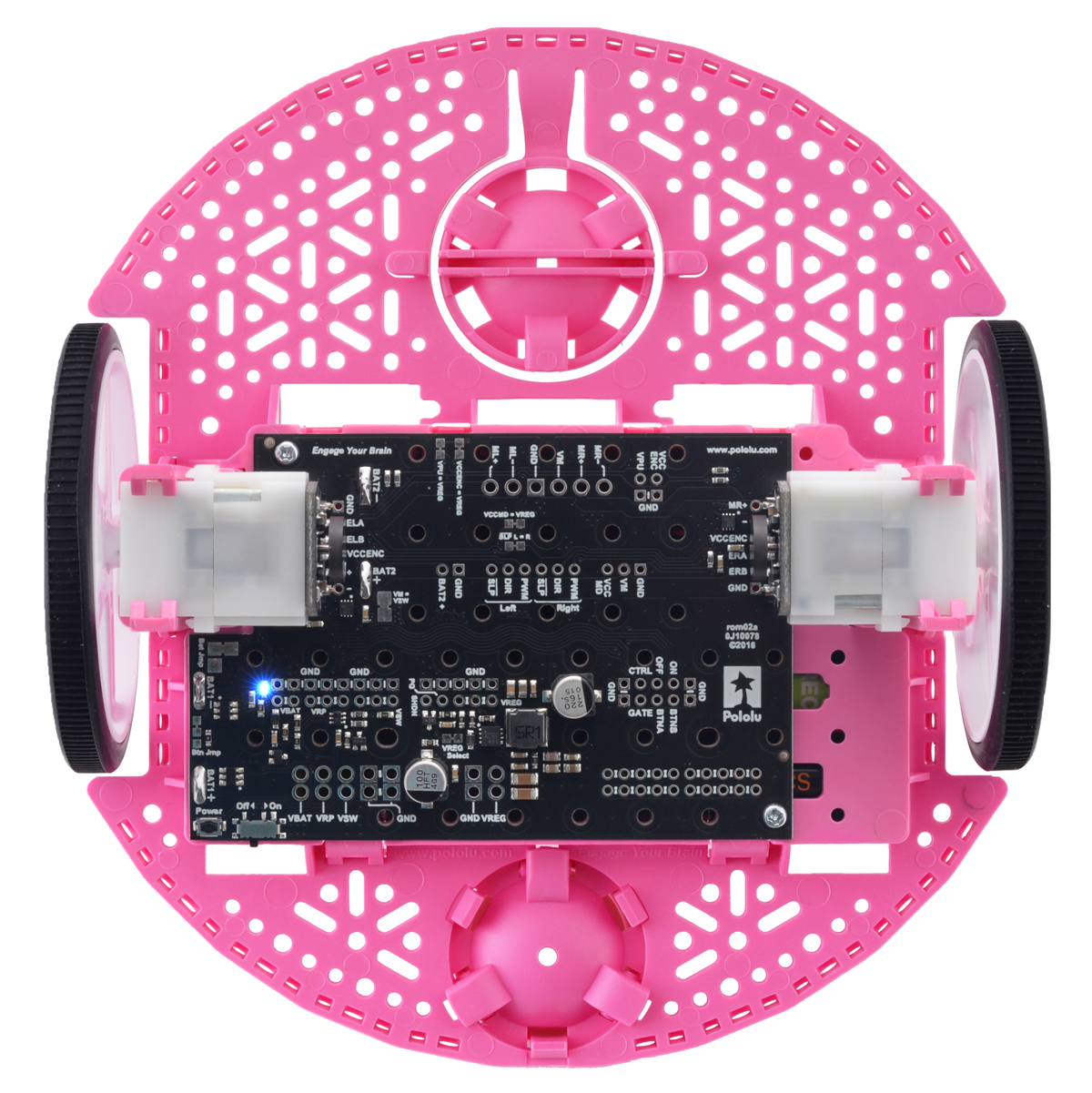
| El codificador Romi puede conectarse directamente al controlador del motor y a la placa de distribución de energía para el chasis Romi. |
|---|
- Alternativamente, si no tiene la intención de usar codificadores Romi, le recomendamos soldar cables a sus cables de motor e instalar Bloques terminales de paso de 3.5 mm a los orificios de salida del conductor del motor a lo largo del borde frontal del tablero. Estos bloques de terminales le permitirán realizar conexiones temporales entre sus motores y la placa del conductor del motor. Sugerimos conectar el cable de avance de cada motor a la salida del motor + ( positiva ) para que las direcciones del motor coincidan con el comportamiento descrito a continuación.
Lea atentamente el resto de esta página para determinar qué conectores adicionales puede desear y dónde deben instalarse.
Es posible retirar la placa del chasis más tarde para soldar conexiones adicionales, y algunos de los agujeros pasantes se pueden soldar a través de las ranuras en el chasis mientras se monta la placa, pero soldar de antemano es más fácil y evita el riesgo de derretir inadvertidamente el chasis con su soldador.
Los cuatro terminales de batería deben soldarse a la placa después está montado en el chasis, como se describe en las instrucciones de montaje del chasis. Podrá quitar la placa y los contactos de la batería del chasis como una sola pieza después de soldar.
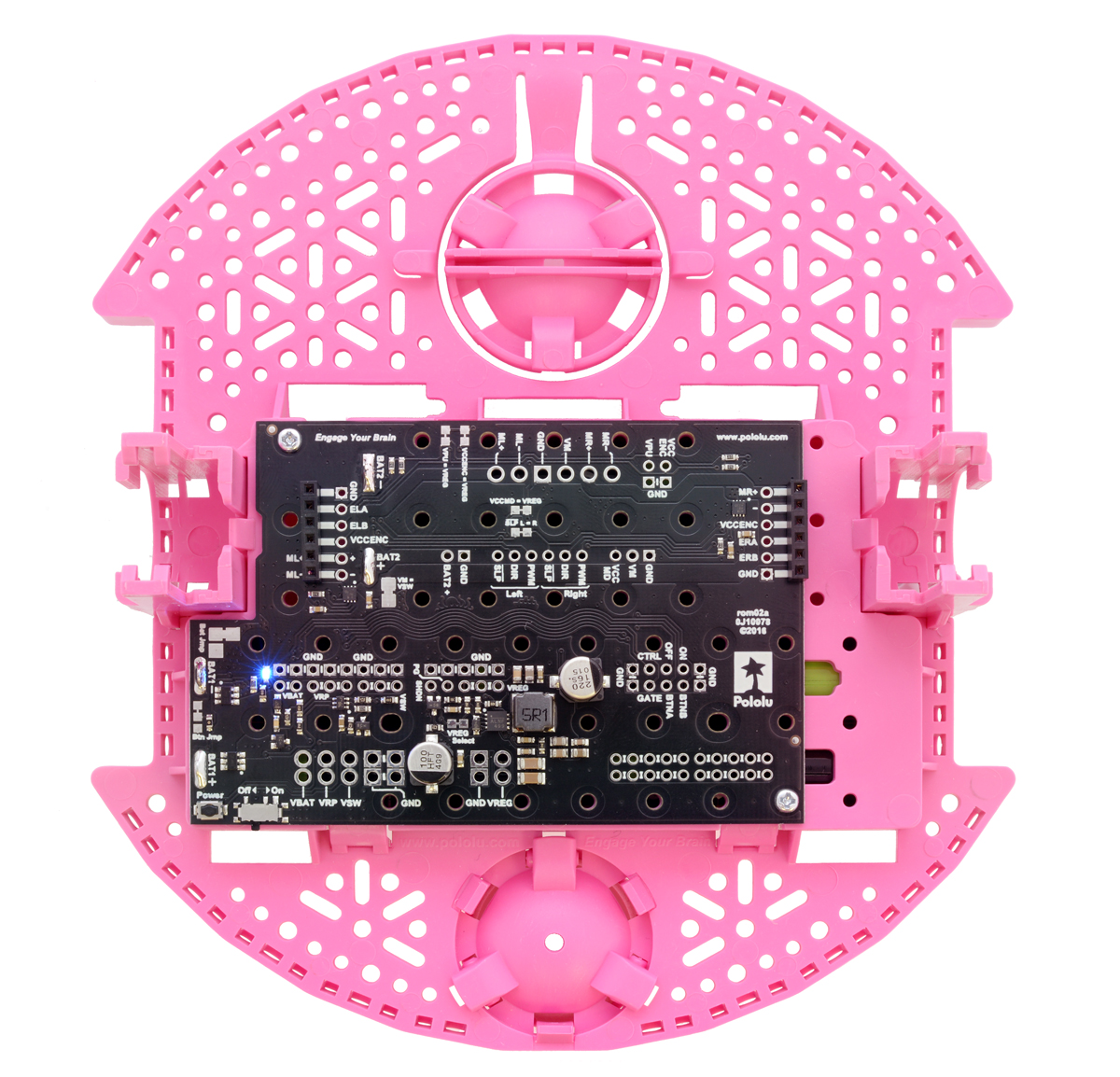
Una vez que haya soldado sus conexiones a través del orificio al conductor del motor y al panel de distribución de energía, siga el instrucciones dado en el Guía del usuario del chasis Pololu Romi para terminar de ensamblar el chasis, montar la placa de control y soldar en los contactos de la batería. ( Los diagramas en esas instrucciones muestran el montaje con el más grande Junta de control Romi 32U4, pero se aplican los mismos pasos para el controlador de motor más pequeño y la placa de distribución de energía. )
Conductores de motor
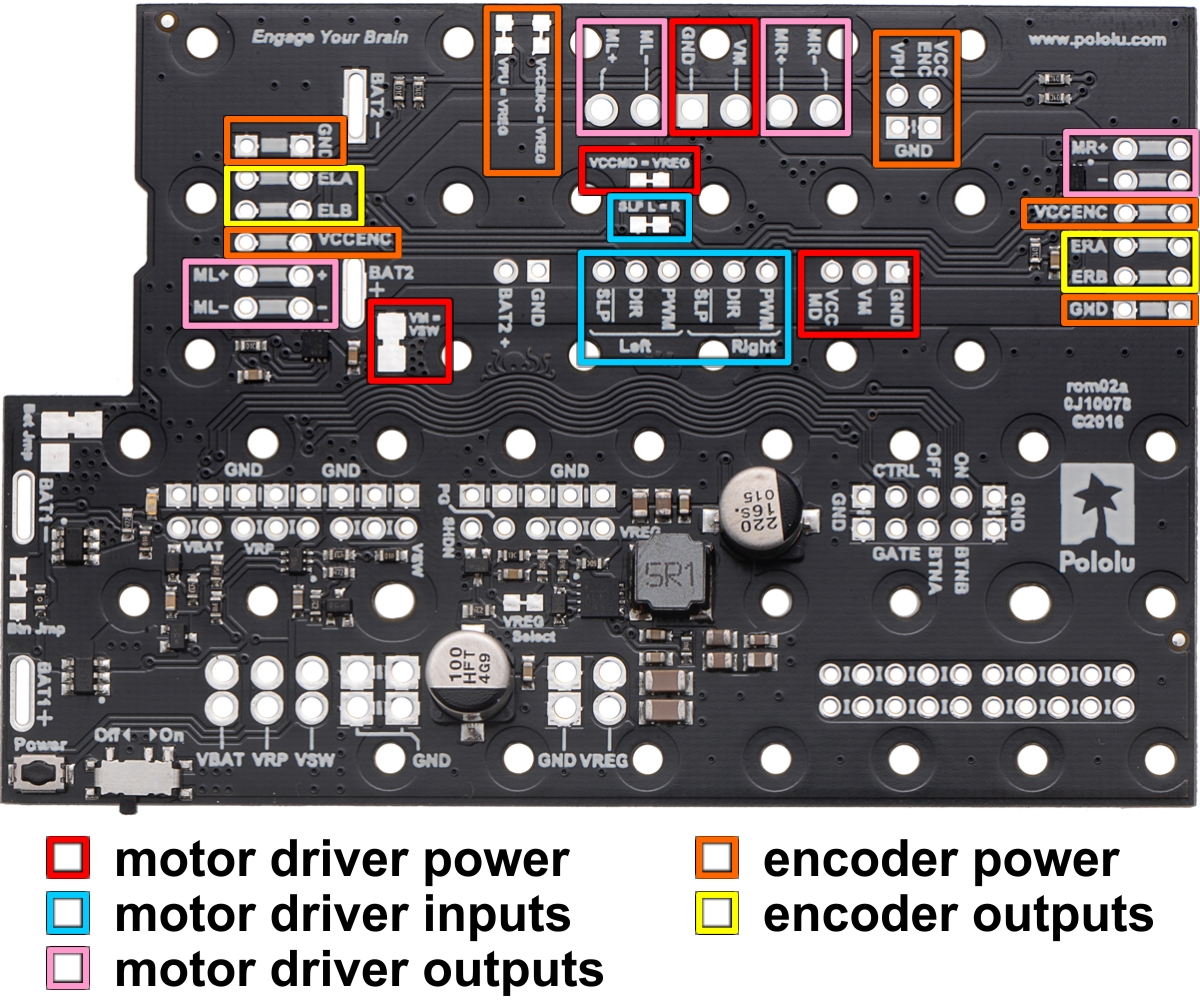
El controlador del motor y la placa de distribución de energía tienen dos controladores de motor DRV8838 de Texas Instruments que pueden alimentar los motores del chasis Romi. Recomendamos una lectura cuidadosa de la Hoja de datos DRV8838 para información sobre los conductores.
De manera predeterminada, el voltaje del motor ’ ( VM ) es suministrado por el voltaje de batería conmutada de la placa, VSW, y su voltaje lógico ( VCCMD ) es suministrado por la salida del regulador a bordo, VREG ( 5 V por defecto ). Si desea personalizar estos voltajes, puede cortar los puentes etiquetados VM = VSW y VCCMD = VREG y conecte los suministros apropiados a los pines VM y VCCMD.
El DRV8838 ofrece una interfaz de control PHASE / ENABLE simple de dos pines, que esta placa pone a disposición para cada motor como DIR y PWM, respectivamente. El pasador DIR determina la dirección del motor ( baja impulsa el motor hacia adelante, lo conduce en reversa ) y el pasador PWM se puede suministrar con una señal PWM para controlar la velocidad del motor. Las entradas de control DIR y PWM se tiran a través de resistencias internas de tracción hacia abajo débiles ( aproximadamente 100 kΩ ). Cuando el pasador PWM es bajo, las salidas del motor se acortan a tierra, lo que resulta en el frenado dinámico de un motor conectado.
Los dos conductores ’ DORMIR pines ( etiquetados SLP) están conectados entre sí de forma predeterminada y se puede bajar para colocar los controladores en un modo de suspensión de baja potencia y apagar las salidas del motor, lo cual es útil si quieres dejar que los motores se desvanezcan. los DORMIR los pasadores se tiran a través de resistencias pull-up de 10 kΩ en el tablero para que los controladores estén despiertos de manera predeterminada. En la mayoría de las aplicaciones, estos pines se pueden dejar desconectados; si quieres un control independiente de DORMIR en cada lado, puede cortar el puente etiquetado SLP L = R. Los dos DORMIR los pasadores no deben conducirse por separado sin cortar este puente.
La siguiente tabla de verdad simplificada muestra cómo funciona cada controlador:
| DIR | PWM | DORMIR | Motor + | Motor − | modo de funcionamiento |
|---|---|---|---|---|---|
| 0 | PWM | 1 | PWM | L | hacia adelante / freno a velocidad PWM % |
| 1 | PWM | 1 | L | PWM | reverso / freno a velocidad PWM % |
| X | 0 | 1 | L | L | salidas de freno bajo ( acortadas a tierra ) |
| X | X | 0 | Z | Z | salidas costeras ( flotantes / desconectadas ) |
Conexiones de codificador
El controlador del motor y la placa de distribución de energía están diseñados para permitir que el kit de par de codificador Romi se conecte directamente a los encabezados del codificador. Los codificadores se pueden usar para rastrear la velocidad de rotación y la dirección de las ruedas motrices del robot. Proporcionan una resolución de 12 recuentos por revolución del eje del motor al contar ambos bordes de ambos canales, lo que corresponde a aproximadamente 1440 recuentos por revolución de las ruedas de Romi. Para obtener más información sobre las especificaciones de los codificadores Romi, consulte el Página del producto Romi Encoder Pair Kit.
Para un uso típico, un conjunto de agujeros pasantes a cada lado de la placa de potencia y distribución del motor se rellenará con el encabezado femenino para el tablero del codificador; recomendamos utilizar el conjunto externo en cada lado para este propósito. El conjunto restante de agujeros pasantes se puede usar para hacer conexiones a las señales del codificador.
Para ambos codificadores, el canal B conduce el canal A cuando el motor gira en la dirección hacia adelante; es decir, B se eleva antes de que A se eleve y B cae antes de que A caiga. Tenga en cuenta que esta descripción designa las señales A y B como están etiquetadas en el controlador del motor y en la placa de distribución de energía, lo que coloca a A al frente en ambos lados.
De forma predeterminada, tanto el voltaje lógico para los codificadores ( VCCENC ) como el voltaje de extracción para las salidas del codificador de drenaje abierto ( VPU ) son suministrados por la salida del regulador a bordo, VREG ( 5 V por defecto ). Si desea personalizar estos voltajes, puede cortar los puentes etiquetados VCCENC = VREG y VPU = VREG y conecte los suministros apropiados a los pines VCCENC y VPU.
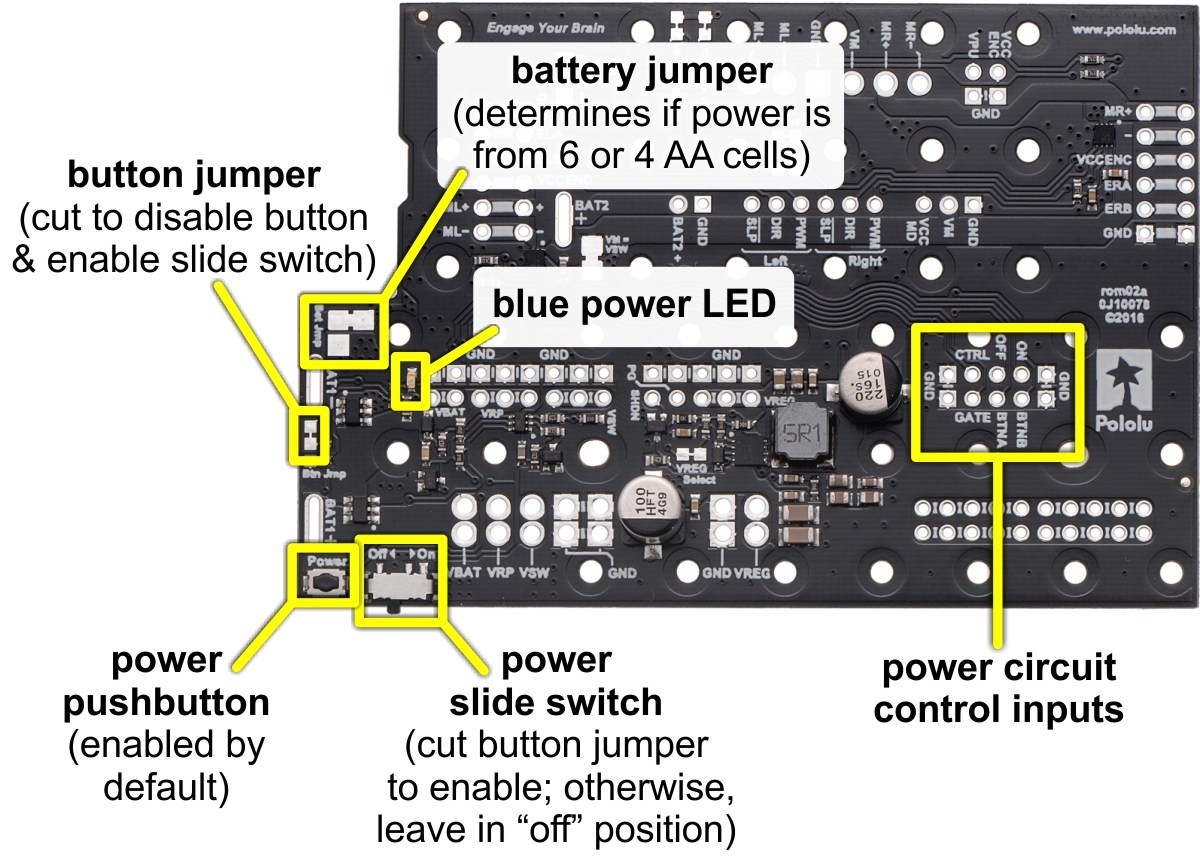
Circuito de interruptor de encendido
De forma predeterminada, el botón de a bordo se puede usar para alternar la potencia: un empujón enciende la alimentación y otro la apaga. Alternativamente, se puede conectar un botón separado al BTNA y BTNB alfileres y usados en su lugar. Se pueden conectar múltiples botones en paralelo para múltiples puntos de control, y cada uno de los botones paralelos, incluido el del tablero, podrá encender o apagar el interruptor. El circuito de bloqueo realiza algunos botones de rebote, pero los botones con rebote excesivo ( varios ms ) podrían no funcionar bien con él.
Para una operación adecuada del botón, el interruptor deslizante de la placa debe dejarse en su Apagado posición. ( Deslizar el interruptor a la posición de encendido hará que la alimentación de la placa se enganche, y el interruptor debe volver a la posición de apagado antes de que el tablero se pueda apagar con el botón pulsador. )
Alternativamente, para deshabilitar el botón, puede cortar el puente del botón etiquetado Btn Jmp; esto transfiere el control de la potencia de la placa al interruptor deslizante de a bordo. Se puede conectar un interruptor deslizante o alternador por separado al PUERTA pin y usado en su lugar.
Hay opciones de control más avanzadas disponibles a través de los pines de conexión del botón y cuatro entradas de control:
| PIN | Descripción |
|---|---|
| BTNA | Conéctese a través del interruptor momentáneo al pin “ BTNB ” para la operación estándar de encendido / apagado. Conéctese a través del interruptor momentáneo a tierra para una operación solo. |
| BTNB | Conéctese a través del interruptor momentáneo al pin “ BTNA ” para la operación estándar de encendido / apagado. |
| ENCENDIDO | Un pulso alto ( > 1 V ) en este pin enciende el circuito del interruptor. Este pin solo funciona cuando la operación del botón está habilitada ( i.e. el puente del botón no se ha cortado ). |
| APAGADO | Un pulso alto ( > 1 V ) en este pin apaga el circuito del interruptor ( p. permitiendo que un dispositivo alimentado apague su propia potencia ). Este pin solo funciona cuando la operación del botón está habilitada. |
| CTRL | Con la operación del botón habilitada, este pin determina directamente el estado del circuito del interruptor. Un pulso alto ( > 1 V ) en este pin enciende el interruptor; un pulso bajo ( p. conducir el pin bajo con una línea de salida de microcontrolador o presionar un botón conectado desde este pin a tierra ) apaga el interruptor. Deje este pin desconectado o flotando cuando no intente establecer el estado del interruptor. Tenga en cuenta que este pin no debe conducirse alto al mismo tiempo que el pin “ OFF ” se conduce alto. |
| PUERTA | Con operación de botón discapacitado( corte del puente del botón ), este pasador controla el estado del circuito del interruptor: al encenderlo, se enciende el interruptor y, al dejar que el flotador apague el interruptor. Conéctese a través del interruptor deslizante o alternador a tierra para la operación de encendido / apagado. Deje este pasador desconectado o flotando para un correcto funcionamiento del botón. Recomendamos solo conducir este pin bajo o dejarlo flotando; este pin debería nunca se conduce alto mientras el interruptor deslizante está en la posición “ Off ”. |
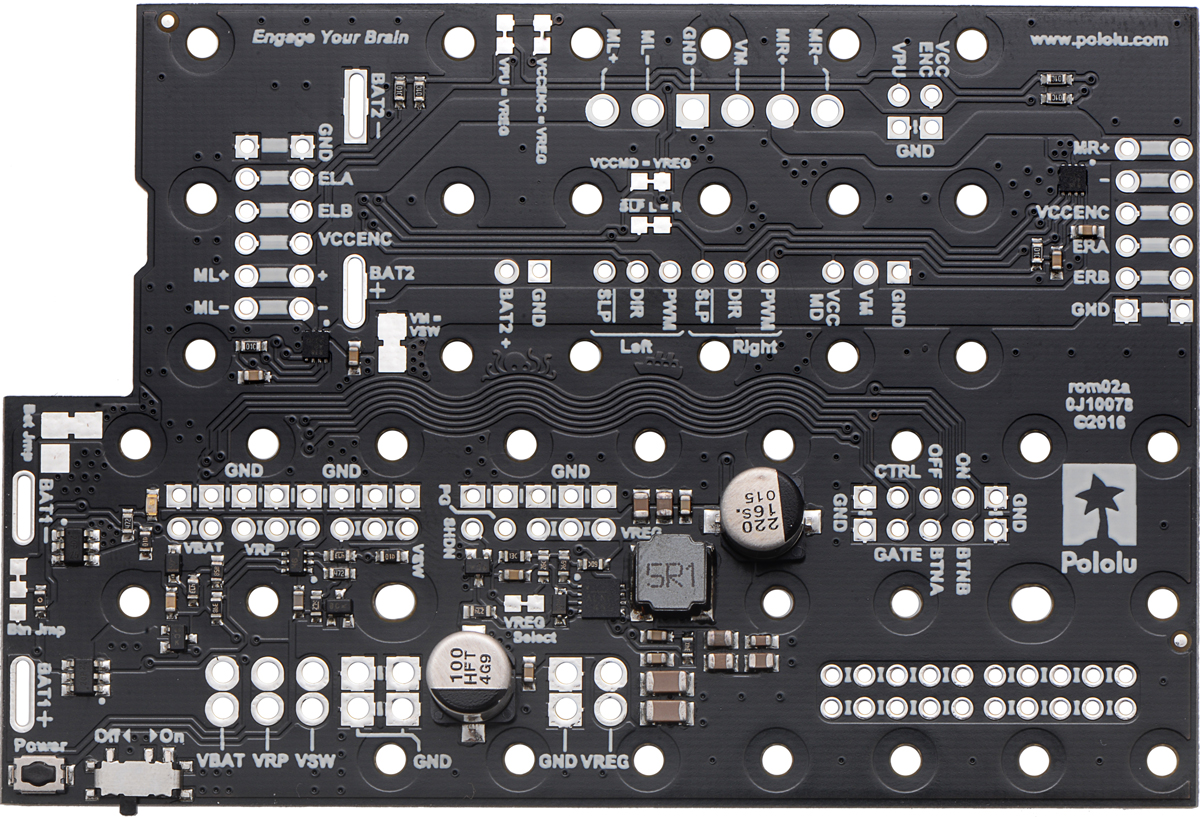
Distribución de energía
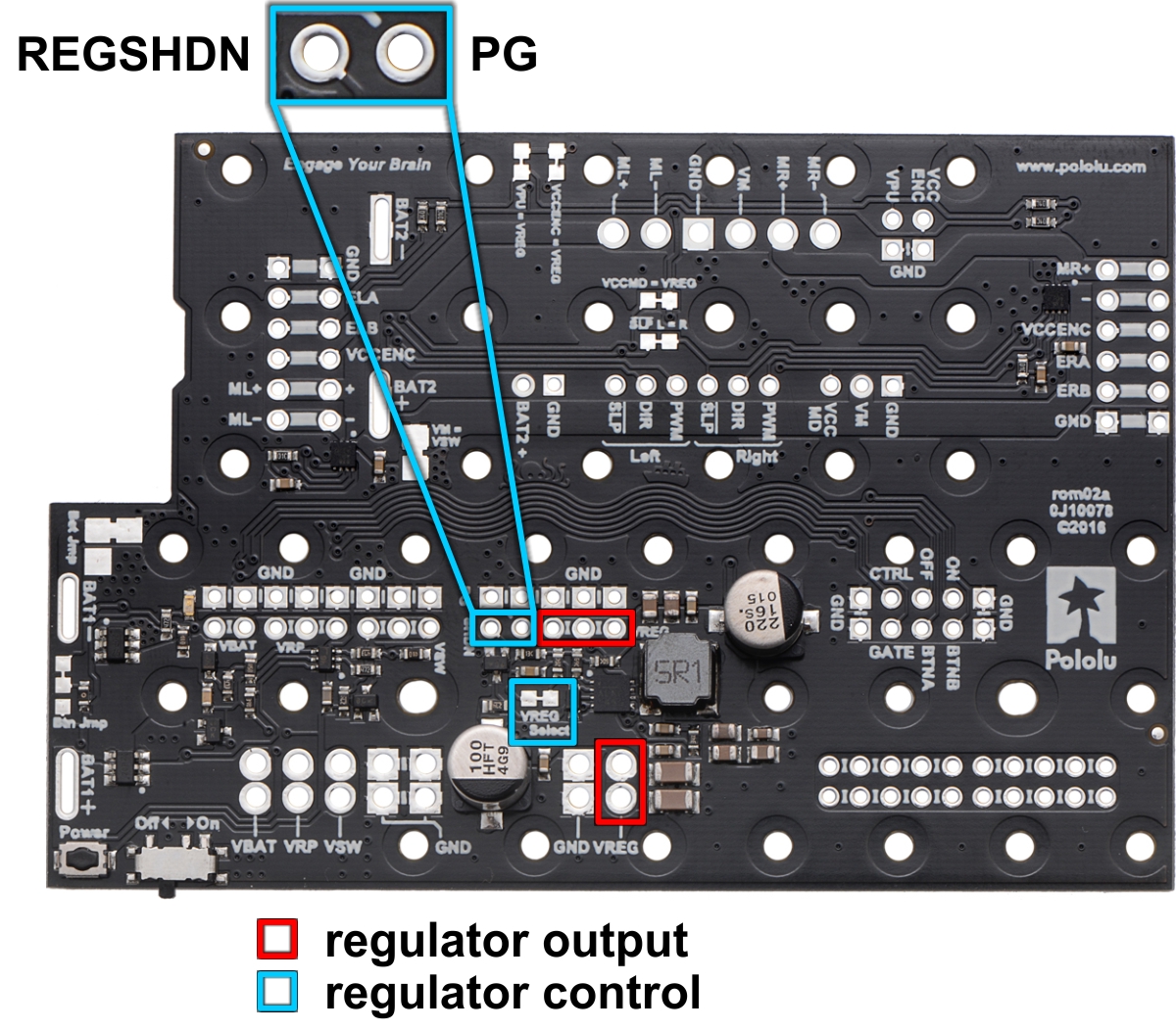
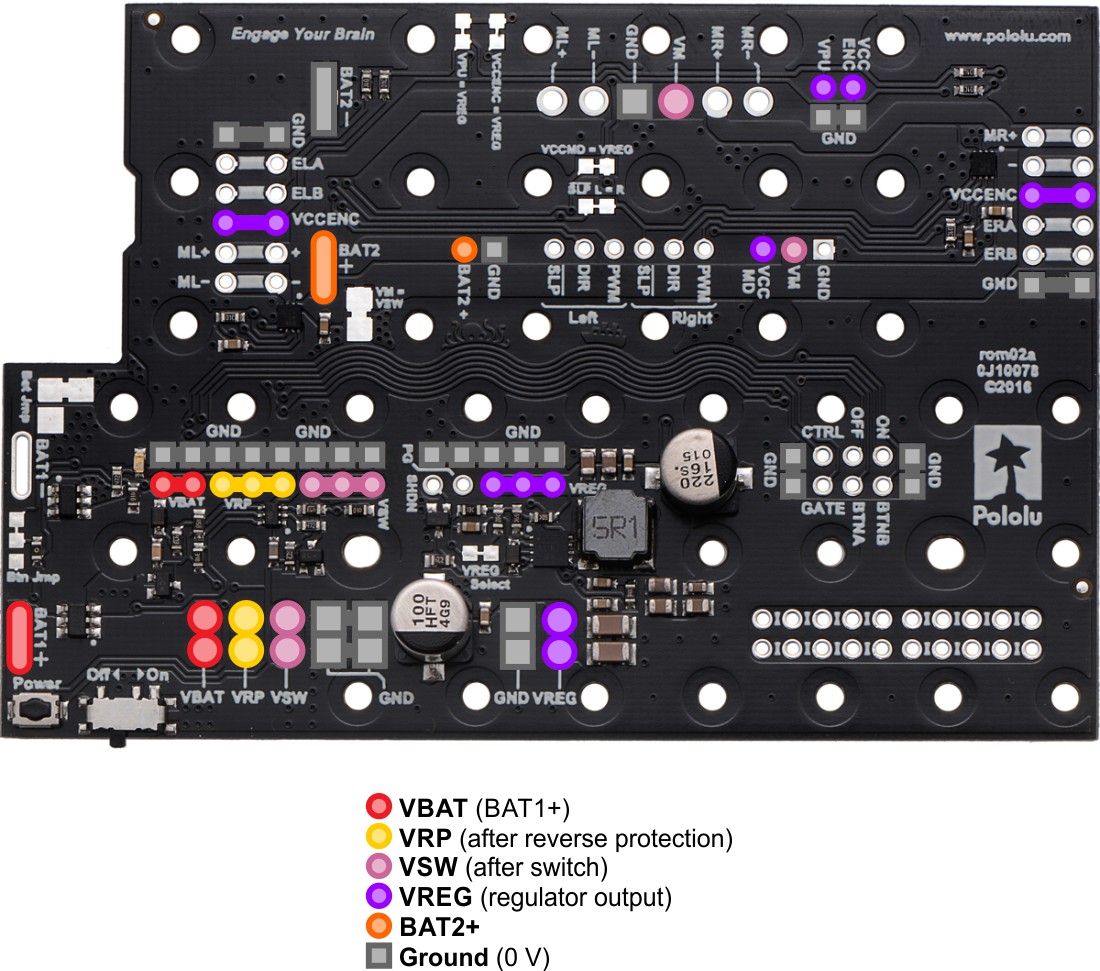
El siguiente diagrama muestra el diseño de los buses de distribución de energía y los puntos de acceso en el tablero.
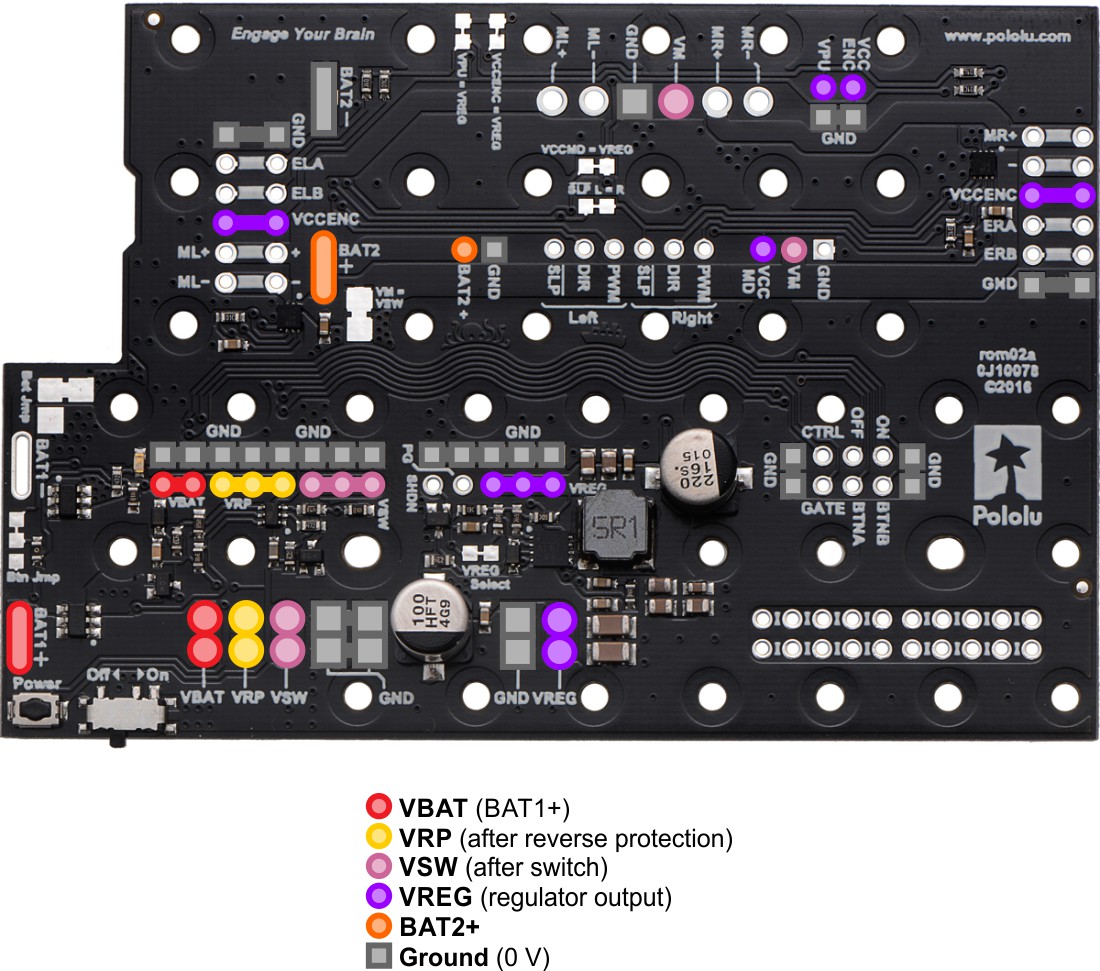 |
- VBAT está conectado al contacto de la batería etiquetado BAT1 + y proporciona una conexión directa al suministro de batería. De manera predeterminada, VBAT es el lado alto de las seis celdas de batería AA del chasis en serie, aunque esto se puede reconfigurar con el puente de batería ( ver más abajo ).
- VRP proporciona acceso a la tensión de la batería después de la protección contra voltaje inverso.
- VSW es el voltaje de la batería después de la protección inversa y el circuito del interruptor de alimentación. Por defecto, proporciona energía a los motores ( VM ) a través de los conductores de motores a bordo.
- VREG es la salida del regulador de voltaje descendente a bordo ( consulte la sección “ Regulador de voltaje ” a continuación ). De forma predeterminada, mide 5 V y proporciona energía lógica a los controladores de motor ( VCCMD ) y a los conectores de codificador ( VCCENC y VPU ).
- BAT2 + proporciona acceso al lado alto de dos celdas AA en serie. Esto puede ser útil si reconfigura la placa para proporcionar dos suministros de batería separados como se describe a continuación.
Regulador de voltaje
Un convertidor de batería de conmutación MP4423H regula el voltaje de batería conmutada ( VSW ) para proporcionar una salida regulada, VREG. La salida regulada es de 5 V por defecto, pero se puede cambiar a 3.3 V cortando el puente etiquetado VREG Select. En condiciones típicas, hasta 2 A de corriente está disponible en la salida VREG. ( También hacemos un regulador independiente basado en este circuito integrado. )
Configuración de suministro de batería
La configuración predeterminada del controlador del motor y la placa de distribución de energía proporciona energía de la batería, VBAT, de las seis celdas AA del chasis en serie ( nominalmente alrededor de 7.2 V con baterías recargables o 9 V con baterías alcalinas ). Sin embargo, el puente de batería de la placa está etiquetado Bat Jmp, le permite reconfigurar las conexiones de la batería para proporcionar dos suministros independientes: BAT1, con 4 celdas en serie ( nominalmente 4.8 V recargable o 6 V alcalino ), y BAT2, con 2 celdas en serie ( nominalmente 2.4 V recargable o 3 V alcalino ). Cortar la conexión entre las almohadillas BAT1 − y BAT2 + separa los dos conjuntos de baterías, y el uso de soldadura para unir las almohadillas BAT1 − y GND establece un terreno común entre los dos nuevos suministros.
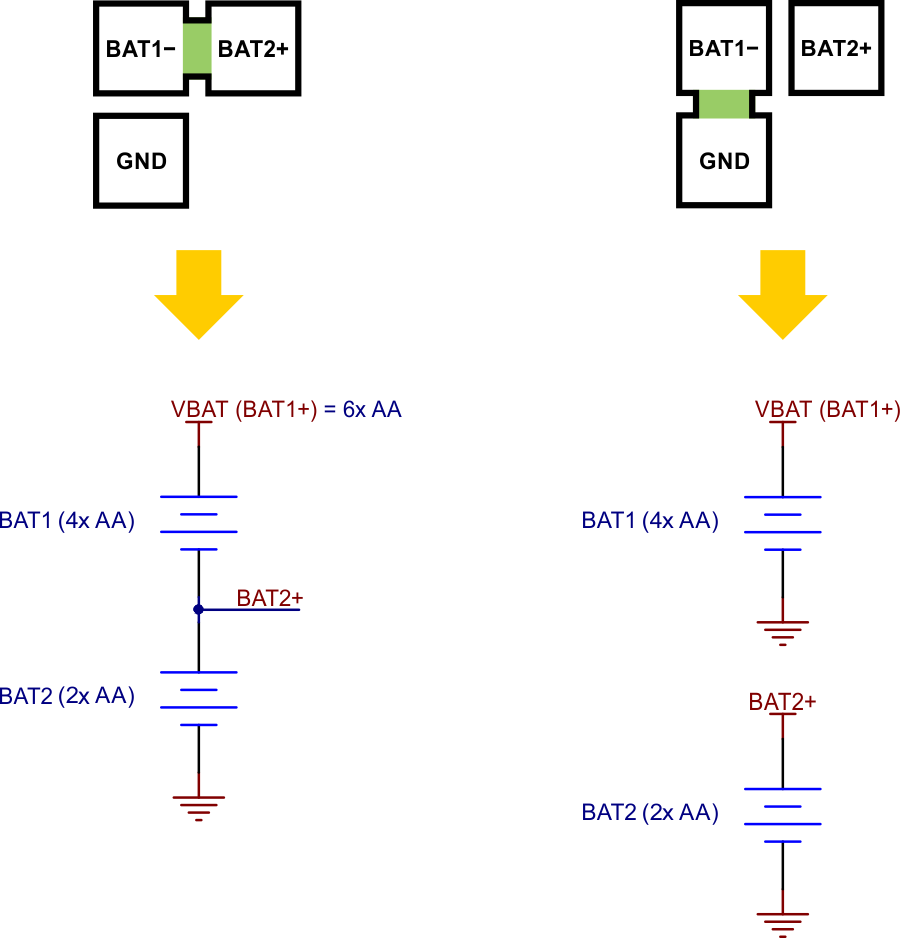 |
Advertencia: No puentee las almohadillas BAT1 − y GND sin desconectar primero BAT1 − de BAT2 +. De lo contrario, podría crear un corto circuito a través de las baterías BAT2.
Tenga en cuenta que es posible que el regulador a bordo no pueda suministrar 5 V de manera tan confiable si VBAT se reconfigura para que provenga de un suministro de 4 celdas, especialmente si está utilizando baterías recargables.
Esquema
Se puede descargar un diagrama esquemático simplificado de este tablero: Diagrama esquemático del controlador del motor y la placa de distribución de energía para el chasis Romi ( 272k pdf )


Valoraciones
No hay valoraciones aún.