Descripción
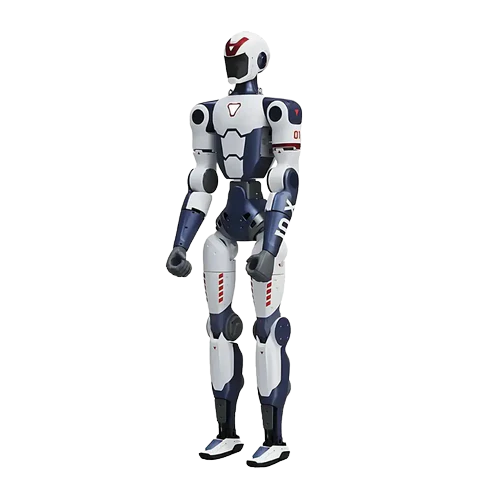
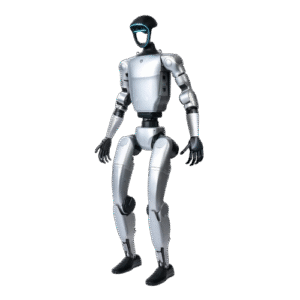
El R1 Basic es un robot humanoide compacto, diseñado para investigación inicial, educación y pruebas operativas ligeras. Con 24 grados de libertad y un peso reducido de 25 kg, ofrece una movilidad destacada y articulaciones similares a las humanas en un formato más pequeño y portátil.
Equipado con un CPU de 8 núcleos, visión binocular y un cuerpo de aleación de aluminio, el R1 Basic es una plataforma potente para desarrollar y probar control de movimiento, algoritmos de equilibrio e interacción humano–robot en escenarios reales. Además, integra Wi-Fi 6, Bluetooth 5.2 y un sistema de batería de cambio rápido con una autonomía de una hora, pensado para un uso intuitivo y ciclos de prueba continuos en laboratorios y entornos educativos.
Características principales del R1 Basic
Movilidad dinámica y control preciso
Dispone de 26 grados de libertad distribuidos en:
-
6 DOF por pierna
-
5 DOF por brazo
-
2 articulaciones en la cabeza
-
Doble articulación en la cintura
Esto permite un movimiento fluido y realista propio de un humanoide.
Estructura ligera y portátil
Con un peso de 29 kg (incluyendo batería) y una altura de 121 cm, es compacto, fácil de transportar y perfecto para laboratorios, aulas y demostraciones.
Sistema de visión integrado
La cámara binocular proporciona percepción en tiempo real y conciencia de profundidad, esenciales para reconocimiento ambiental y navegación.

Computación de alto rendimiento
Equipado con un CPU de 8 núcleos, junto con Wi-Fi 6 y Bluetooth 5.2, ofreciendo conectividad inalámbrica confiable, de baja latencia y actualizaciones OTA inteligentes.
Sistema de energía modular
La batería de liberación rápida proporciona aproximadamente 1 hora de operación, y puede intercambiarse fácilmente para sesiones prolongadas.
Interfaz de audio completa
Incluye un array de micrófonos y parlantes estéreo integrados, permitiendo aplicaciones interactivas y pruebas de comunicación humano–robot.
Especificaciones
Software
| CPU principal | Procesador de alto rendimiento de 8 núcleos |
|---|---|
| Módulo de alta potencia informática | No compatible |
| Apoyo al desarrollo secundario | No compatible |
Chasis y marco
| Dimensiones largo x ancho x alto (de pie) | 1230x357x190mm |
|---|---|
| Peso (con batería) | 29 kg |
| Materiales | Aleación de aluminio y plástico de ingeniería de alta resistencia |
| Manos diestras | No incluido |
Batería
| Tipo de batería | Batería inteligente de litio (liberación rápida) |
|---|---|
| Duración de la batería | ~1 hrs |
| Adaptador de carga | Incluido |
Grados de Libertad
| Totales | 26 |
|---|---|
| Cabeza | 2 |
| Cintura | 2 |
| Brazo | 5 |
| Pierna | 6 |
Motores y construcción
| Torsión máxima de la articulación del brazo | Alrededor de 2 kg |
|---|---|
| Rodamiento de salida conjunta | Rodamientos de rodillos cruzados, Rodamientos de bolas de doble gancho |
| Motor de la junta | PMSM (motor síncrono de imán permanente) de rotor interno de baja inercia y alta velocidad, mejor respuesta para velocidad y disipación de calor |
| Enrutamiento eléctrico | Hueco + enrutamiento interno |
| Longitud de pantorrilla + muslo | 600mm |
| Longitud del antebrazo + parte superior del brazo | 420 mm |
Rangos de movimiento
| Cintura | Y±150° R±30° |
|---|---|
| Rodilla | -10°~+139° |
| Cadera | Y:±157° P:-168° ~+146° R:-60° ~+100° |
Cámaras y Sensores
| LiDAR 3D | TBD |
|---|---|
| Cámara | Binocular |
Audio y Conectividad
| Wi-Fi | Wi-Fi 6 |
|---|---|
| Bluetooth | Bluetooth 5.2 |
| Opción de control remoto | Si |
| Matriz de micrófonos | matriz de 4 micrófonos |
| Altavoz incorporado | Altavoces estéreo duales de 3 W (2x) |
Características Adicionales
| Sistema de actualización OTA | Si |
|---|---|
| Controlador manual | Si |
| Cableado de junta hueca | Si |
| Codificador conjunto | Encoder Doble y Simple |
| Sistema de enfriamiento | Refrigeración por aire local |
Componentes que Incluye:
- R1 Basic
- Mando a distancia
- Batería R1 (1x)

Valoraciones
No hay valoraciones aún.