Descripción
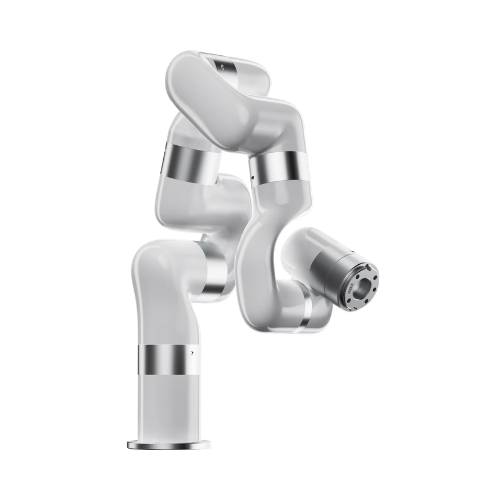
El brazo robótico UFACTORY xArm 7 (7-DoF), con un alcance de 700 mm y equipado con Caja de Control AC y cables de 1,5 m, se distingue por ser un manipulador de alta destreza. Diseñado para sectores como la educación, la investigación y desarrollo (I+D) y la automatización ligera, su principal fortaleza reside en su arquitectura de 7 ejes. Esta configuración proporciona redundancia cinemática, una característica clave que le permite esquivar obstáculos, optimizar la postura de sus articulaciones y evitar singularidades mecánicas, todo ello mientras ejecuta movimientos suaves y precisos en tareas de ensamblaje, inspección y manipulación (pick & place).
El paquete se entrega con una caja de control AC para asegurar una alimentación eléctrica fiable y la gestión de entradas/salidas (E/S), junto con cables de 1,5 metros para una instalación limpia. Además, es totalmente compatible con el ecosistema de efectores finales de UFACTORY (pinzas de dos dedos, paralelas, de vacío o personalizadas), adaptándose a cualquier flujo de trabajo.
El xArm 7 ofrece una capacidad de carga de 3,5 kg con una precisión de ±0,1 mm. Gracias a sus articulaciones redundantes, este modelo ofrece una flexibilidad superior, similar a la de un brazo humano, lo que lo convierte en la herramienta definitiva para la investigación en campos avanzados como la Inteligencia Artificial (IA) y la Visión por Computadora (CV).
Software y Funcionalidades del Sistema
El control del robot se centraliza en UFACTORY Studio, una plataforma de interfaz gráfica completa que funciona como una solución de sistema único, reduciendo drásticamente los tiempos de ingeniería y fabricación. El sistema incluye un abanico completo de capacidades:
-
Programación visual y Gráfica.
-
Enseñanza manual directa.
-
Detección de colisiones y prevención de autocolisiones.
-
Configuración de límites de seguridad y grabación de trayectorias.
-
Ejecución de tareas en modo Offline.
-
Soporte robusto para Python, ROS/ROS2 y simulación 3D.
Construcción Industrial y Durabilidad
Concebido para la automatización intensiva, el xArm 7 integra servomotores y accionamientos armónicos de grado industrial que garantizan una operatividad continua 24/7. A pesar de su robustez, está fabricado en fibra de carbono, manteniendo un peso ligero de 15 kg que facilita enormemente su despliegue y transporte.
Flexibilidad de Despliegue, Seguridad y Programación
Este cobot destaca por su despliegue flexible y seguro. Es ligero, compacto y permite la enseñanza manual, lo que facilita su reubicación en distintas aplicaciones sin alterar la línea de producción existente; ideal para tareas recurrentes. La seguridad es prioritaria, por lo que la detección de colisiones está integrada de serie en todos los modelos.
-
Para Principiantes: Interfaz gráfica intuitiva basada en tecnología web, compatible con Windows, macOS y los principales navegadores. Permite programar mediante «arrastrar y soltar» en cuestión de minutos.
-
Para Desarrolladores: Acceso a un potente SDK de código abierto (Python/C++) y paquetes ROS/ROS2 listos para usar, junto con códigos de ejemplo que aseguran una implementación fluida y flexible.
Compatibilidad de Accesorios
El brazo se integra perfectamente con la gama de accesorios oficiales para completar su solución de automatización, incluyendo pinzas estándar, sistemas de vacío, la Pinza BIO G2, sensores de fuerza/torque de 6 ejes y motores lineales.
Especificaciones Técnicas
| Carga útil | 3,5 Kg |
| Alcance | 700 mm |
| Grados de libertad | 7 |
| Repetibilidad | ±0,1 mm |
| Velocidad máxima | 1m/s |
| Peso | 13,7 kg |
| Rango de temperatura ambiente | 0-50°C |
| Consumo de energía | Mínimo 8,4 W, típico 200 W, máximo 400 W |
| Fuente de alimentación de entrada | 24 V CC, 16,5 A. |
| Huella | Ø126mm |
| Materiales | Aluminio, Fibra de Carbono |
| Tipo de conector básico | 5xM5 |
| Sala limpia clase ISO | 5 |
| Montaje de robot | Cualquiera |
| Protocolo de comunicación del efector final | Modbus RTU (rs485) |
| I/O del efector final | 16x DI/16x DO/2x AI/2x AO |
| Modo de comunicación | Ethernet |
| Velocidad de la Junta | 180°/s |
| Rango de Junta | Junta 1: ±360° Junta 2: -118°~120° Junta 3: ±360° Junta 4: -11°~225° Junta 5: ±360° Junta 6: -97°~180° Junta 7: ±360° |
Control Box
| Tipo | Control Box AC | Control Box DC |
| Entrada |
100-240VAC 50/60Hz
|
Consumo de energía |
| Salida |
24 V DC 20,8 A
|
24 V DC, 16,5 A. |
| Peso | 3,9 kilos | Depende de los materiales |
| Dimensiones | 285*135*101mm | 285*135*101mm |
| Control Box IO | 16*DI/16*DO/2*AI/2*AO | 16*DI/16*DO/2*AI/2*AO |
| Comunicación | Ethernet, 1xRS485 maestro, 1xRS485 esclavo | Ethernet, 1x RS485 maestro, 1x RS485 esclavo |

Valoraciones
No hay valoraciones aún.