



Descripción
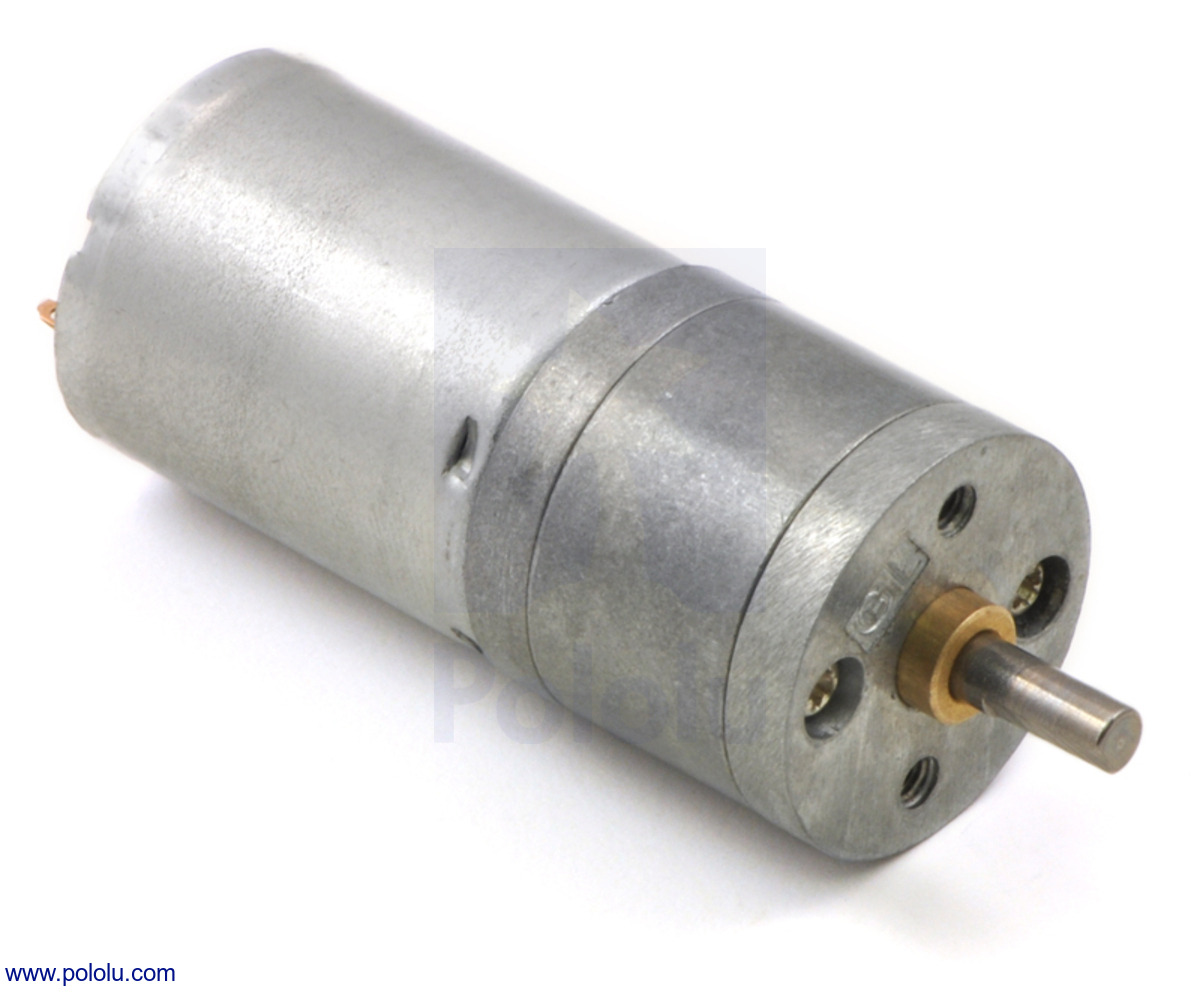
Este motorreductor consta de un alta potencia, 12 V motor de CC cepillado combinado con un 20,4: 1 caja de cambios de metal. El motorreductor es cilíndrico, con un diámetro inferior a 25 mm, y el eje de salida en forma de D tiene 4 mm de diámetro y se extiende 12,5 mm desde la placa frontal de la caja de engranajes. Este motorreductor también está disponible con un codificador integrado.
Este motorreductor consta de un alta potencia, 12 V motor de CC cepillado combinado con un 20,4: 1 caja de cambios de metal. El motorreductor es cilíndrico, con un diámetro inferior a 25 mm, y el eje de salida en forma de D tiene 4 mm de diámetro y se extiende 12,5 mm desde la placa frontal de la caja de engranajes. Este motorreductor también está disponible con un codificador integrado.
Especificaciones clave:
| voltaje | rendimiento sin carga | extrapolación de pérdida |
|---|---|---|
| 12 V | 500 RPM, 250 mA | 7,4 kg ⋅ cm ( 100 oz ⋅ en ), 5,0 A |
Resumen
Estos motores de engranajes de CC cepillados cilíndricos están disponibles en una amplia gama de relaciones de transmisión y con cinco motores diferentes ( dos niveles de potencia de motores de 6 V y tres niveles de potencia de motores de 12 V ). Todos los motores de engranajes tienen la misma caja de 25 mm de diámetro y eje de salida de caja de engranajes de 4 mm de diámetro, por lo tanto, generalmente es fácil cambiar una versión por otra si sus requisitos de diseño cambian ( aunque la longitud de la caja de cambios tiende a aumentar con la relación de transmisión ). Cada versión también está disponible opcionalmente con un codificador de cuadratura integrado de 48 RCP. Ver el Hoja de datos del motorreductor de metal 25D ( 2MB pdf ) para obtener más información, incluidos gráficos de rendimiento detallados para cada versión de motorreductor. También puede usar nuestro ordenable dinámicamente Tabla de comparación de motorreductor 25Dpara buscar la versión que ofrece la mejor combinación de velocidad, par y dibujo actual para su aplicación particular. Una tabla de comparación más básica está disponible a continuación.
| Clasificado Voltaje |
Motor Tipo |
puesto Actual |
Sin carga Actual |
Relación de engranajes | Velocidad sin carga ( RPM ) |
Extrapolado Par de pérdida |
Potencia máxima ( W ) |

Sin codificador |

Con codificador |
|
|---|---|---|---|---|---|---|---|---|---|---|
| ( kg ⋅ cm ) | ( oz ⋅ en ) | |||||||||
| 12 V | Alta potencia ( HP ) |
5.0 A | 250 mA w / o codificador300 mA con codificador |
1: 1 ( sin caja de cambios ) | 10,000 | 0.4 | 5.5 | 10 | – | elemento # 4840 |
| 4.4: 1 | 2200 | 1,7 | 24 | 9,4 | elemento # 3201 | elemento # 4841 | ||||
| 9.7: 1 | 1000 | 3.9 | 54 | 10 | elemento # 3202 | elemento # 4842 | ||||
| 20,4: 1 | 500 | 7.4 | 100 | 9,4 | elemento # 3203 | elemento # 4843 | ||||
| 34: 1 | 300 | 11 | 150 | 8,9 | elemento # 3204 | elemento # 4844 | ||||
| 47: 1 | 220 | 15 | 210 | 8,4 | elemento # 3205 | elemento # 4845 | ||||
| 75: 1 | 130 | 22 | 310 | – | elemento # 3206 | elemento # 4846 | ||||
| 99: 1 | 100 | 29 | 400 | – | elemento # 3207 | elemento # 4847 | ||||
| 12 V | Potencia media ( MP ) |
1.8 A | 80 mA w / o codificador100 mA con codificador |
1: 1 ( sin caja de cambios ) | 8200 | 0,17 | 2,4 | 3.5 | – | elemento # 4860 |
| 4.4: 1 | 1800 | 0,71 | 10 | 3.2 | elemento # 3225 | elemento # 4861 | ||||
| 9.7: 1 | 800 | 1,7 | 24 | 3.4 | elemento # 3226 | elemento # 4862 | ||||
| 20,4: 1 | 380 | 3.2 | 44 | 3.1 | elemento # 3227 | elemento # 4863 | ||||
| 34: 1 | 230 | 4.7 | 65 | 2,8 | elemento # 3228 | elemento # 4864 | ||||
| 47: 1 | 170 | 6.4 | 89 | 2,8 | elemento # 3229 | elemento # 4865 | ||||
| 75: 1 | 100 | 8,5 | 120 | 2,3 | elemento # 3230 | elemento # 4866 | ||||
| 99: 1 | 79 | 11 | 150 | 2,3 | elemento # 3231 | elemento # 4867 | ||||
| 172: 1 | 46 | 18 | 250 | 2.1 | elemento # 3232 | elemento # 4868 | ||||
| 227: 1 | 35 | 24 | 330 | – | elemento # 3233 | elemento # 4869 | ||||
| 12 V | Baja potencia ( LP ) |
0.9 A | 50 mA w / o codificador60 mA con codificador |
1: 1 ( sin caja de cambios ) | 5600 | 0,14 | 1,9 | 1,8 | – | elemento # 4880 |
| 4.4: 1 | 1200 | 0,53 | 7.4 | 1,7 | elemento # 3249 | elemento # 4881 | ||||
| 9.7: 1 | 580 | 1.3 | 18 | 1,8 | elemento # 3250 | elemento # 4882 | ||||
| 20,4: 1 | 280 | 2,4 | 33 | 1,7 | elemento # 3251 | elemento # 4883 | ||||
| 34: 1 | 170 | 3,7 | 51 | 1,6 | elemento # 3252 | elemento # 4884 | ||||
| 47: 1 | 120 | 4.8 | 67 | 1,4 | elemento # 3253 | elemento # 4885 | ||||
| 75: 1 | 75 | 7.1 | 99 | 1,4 | elemento # 3254 | elemento # 4886 | ||||
| 99: 1 | 57 | 8,7 | 120 | 1.2 | elemento # 3255 | elemento # 4887 | ||||
| 172: 1 | 33 | 13 | 180 | 1.1 | elemento # 3256 | elemento # 4888 | ||||
| 227: 1 | 25 | dieciséis | 220 | 1.0 | elemento # 3257 | elemento # 4889 | ||||
| 378: 1 | 15 | 23 | 320 | – | elemento # 3258 | elemento # 4890 | ||||
| 6 V | Alta potencia ( HP ) |
6.0 A | 420 mA w / o codificador500 mA con codificador |
1: 1 ( sin caja de cambios ) | 10,000 | 0.3 | 4 | 7 | – | elemento # 4800 |
| 4.4: 1 | 2200 | 1.2 | 17 | 6,7 | elemento # 1570 | elemento # 4801 | ||||
| 9.7: 1 | 1000 | 2,3 | 32 | 5.9 | elemento # 1571 | elemento # 4802 | ||||
| 20,4: 1 | 480 | 4.8 | 67 | 5.9 | elemento # 1572 | elemento # 4803 | ||||
| 34: 1 | 290 | 6.8 | 94 | 5.1 | elemento # 1573 | elemento # 4804 | ||||
| 47: 1 | 210 | 9.1 | 130 | 4.9 | elemento # 1574 | elemento # 4805 | ||||
| 75: 1 | 130 | 14 | 190 | 4.5 | elemento # 1575 | elemento # 4806 | ||||
| 99: 1 | 99 | 15 | 210 | 3.9 | elemento # 1576 | elemento # 4807 | ||||
| 172: 1 | 57 | 27 | 380 | – | elemento # 1577 | elemento # 4808 | ||||
| 6 V | Baja potencia ( LP ) |
2.0 A | 100 mA w / o codificador120 mA con codificador |
1: 1 ( sin caja de cambios ) | 6200 | 0,15 | 2.1 | 2.1 | – | elemento # 4820 |
| 4.4: 1 | 1300 | 0,63 | 8,7 | 2.1 | elemento # 1581 | elemento # 4821 | ||||
| 9.7: 1 | 630 | 1.3 | 18 | 1,9 | elemento # 1582 | elemento # 4822 | ||||
| 20,4: 1 | 290 | 2,5 | 35 | 1,9 | elemento # 1583 | elemento # 4823 | ||||
| 34: 1 | 180 | 3.9 | 54 | 1,7 | elemento # 1584 | elemento # 4824 | ||||
| 47: 1 | 130 | 4.8 | 67 | 1,5 | elemento # 1585 | elemento # 4825 | ||||
| 75: 1 | 80 | 7,5 | 100 | 1,5 | elemento # 1586 | elemento # 4826 | ||||
| 99: 1 | 61 | 9.1 | 130 | 1,4 | elemento # 1587 | elemento # 4827 | ||||
| 172: 1 | 35 | 14 | 190 | 1.2 | elemento # 1588 | elemento # 4828 | ||||
| 227: 1 | 27 | 17 | 240 | 1.1 | elemento # 1589 | elemento # 4829 | ||||
| 378: 1 | dieciséis | 25 | 350 | – | elemento # 1590 | elemento # 4830 | ||||
| 499: 1 | 12 | 31 | 430 | – | elemento # 1591 | elemento # 4831 | ||||
Nota: Los pares de pérdida y las corrientes enumeradas son extrapolaciones teóricas; las unidades generalmente se detendrán mucho antes de estos puntos a medida que los motores se calientan. Los motores de engranajes de parada o sobrecarga pueden disminuir en gran medida sus vidas e incluso provocar daños inmediatos. El límite superior recomendado para cargas aplicadas continuamente es de 4 kg ⋅ cm ( 55 oz ⋅ en ), y el límite superior recomendado para el par intermitentemente permisible es de 8 kg ⋅ cm ( 110 oz ⋅ en ). Las paradas también pueden provocar un daño térmico rápido ( potencial en el orden de segundos ) a los devanados y cepillos del motor; una recomendación general para la operación del motor de CC cepillado es del 25% o menos de la corriente de pérdida.
En general, este tipo de motores pueden funcionar a voltajes superiores y inferiores a sus voltajes nominales ( pueden comenzar a girar a voltajes tan bajos como 1 V ); los voltajes más bajos pueden no ser prácticos, y los voltajes más altos podrían comenzar a afectar negativamente la vida útil del motor.
Detalles para el artículo # 3203
Relación de engranaje exacta: 22×22×22×2312×10×10×10≈20,4:1
Dimensiones
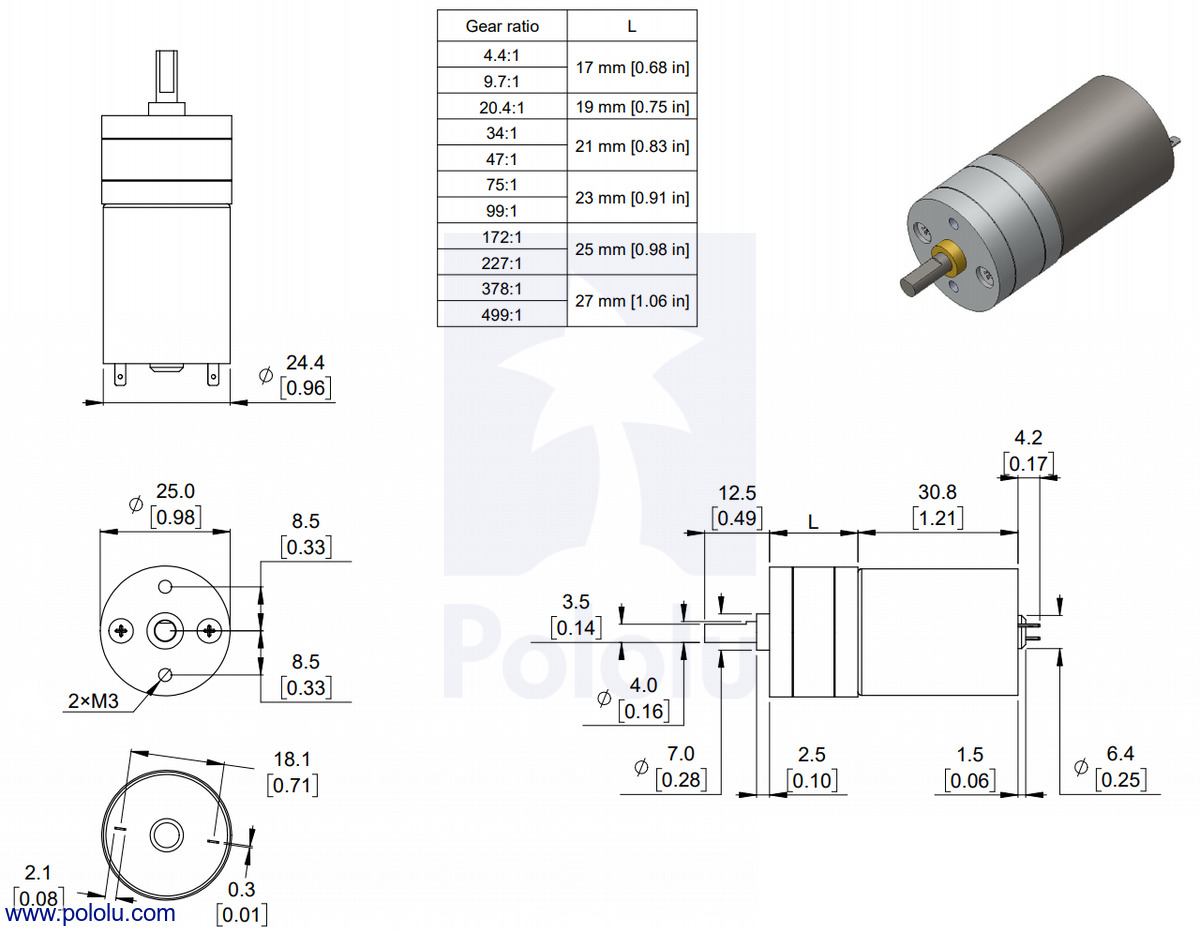
El siguiente diagrama muestra las dimensiones de la línea de motores de engranajes de 25D mm ( las unidades son mm sobre [ pulgadas ] ). Este diagrama también está disponible como PDF descargable ( 171k pdf ).
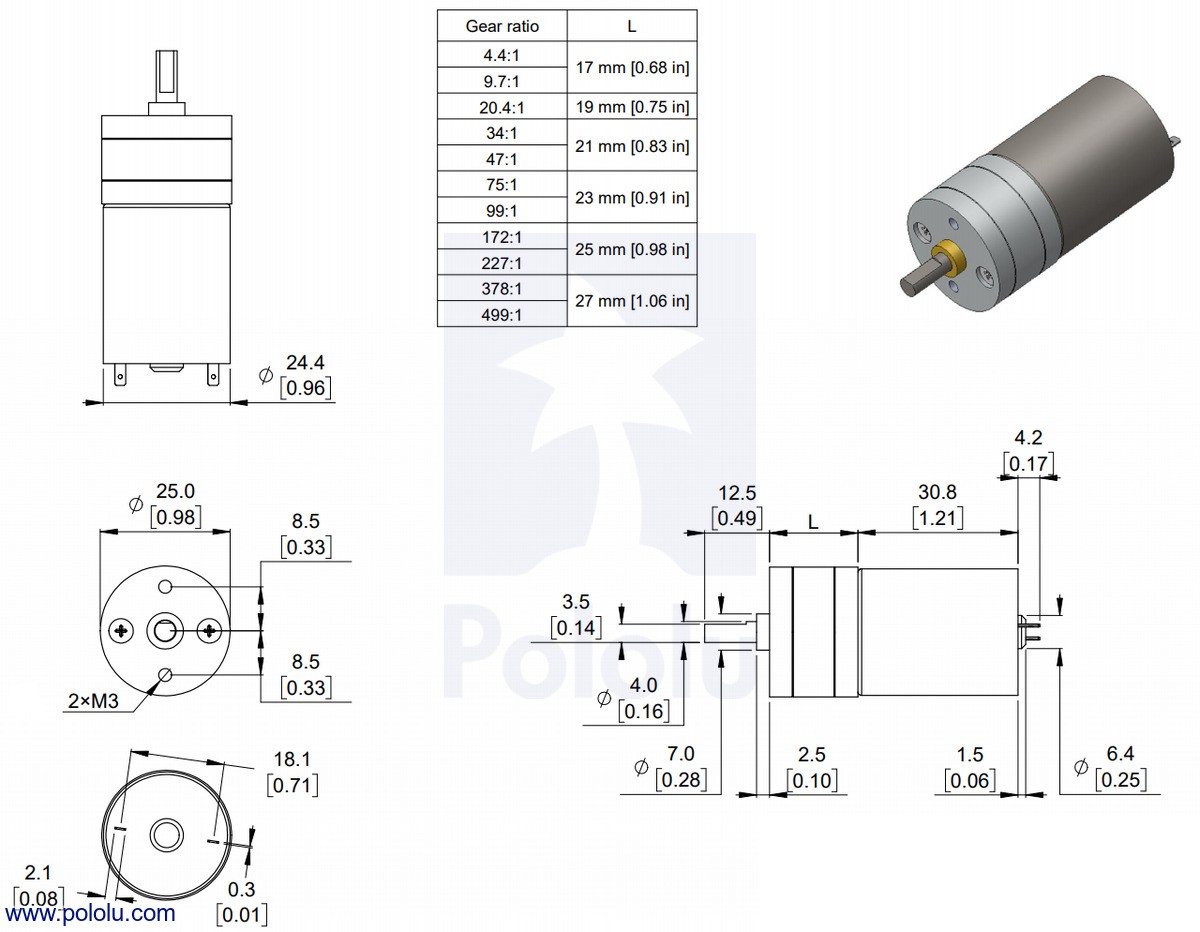 |
| Dimensiones de los motores de engranajes metálicos Pololu 25D mm sin codificadores. Las unidades tienen pulgadas mm sobre [ ]. |
|---|
Advertencia: No atornille demasiado los orificios de montaje ya que los tornillos pueden golpear los engranajes. Recomendamos atornillar no más de 6 mm ( 0.24 ″ ) en el orificio del tornillo.
Accesorios para motorreductores
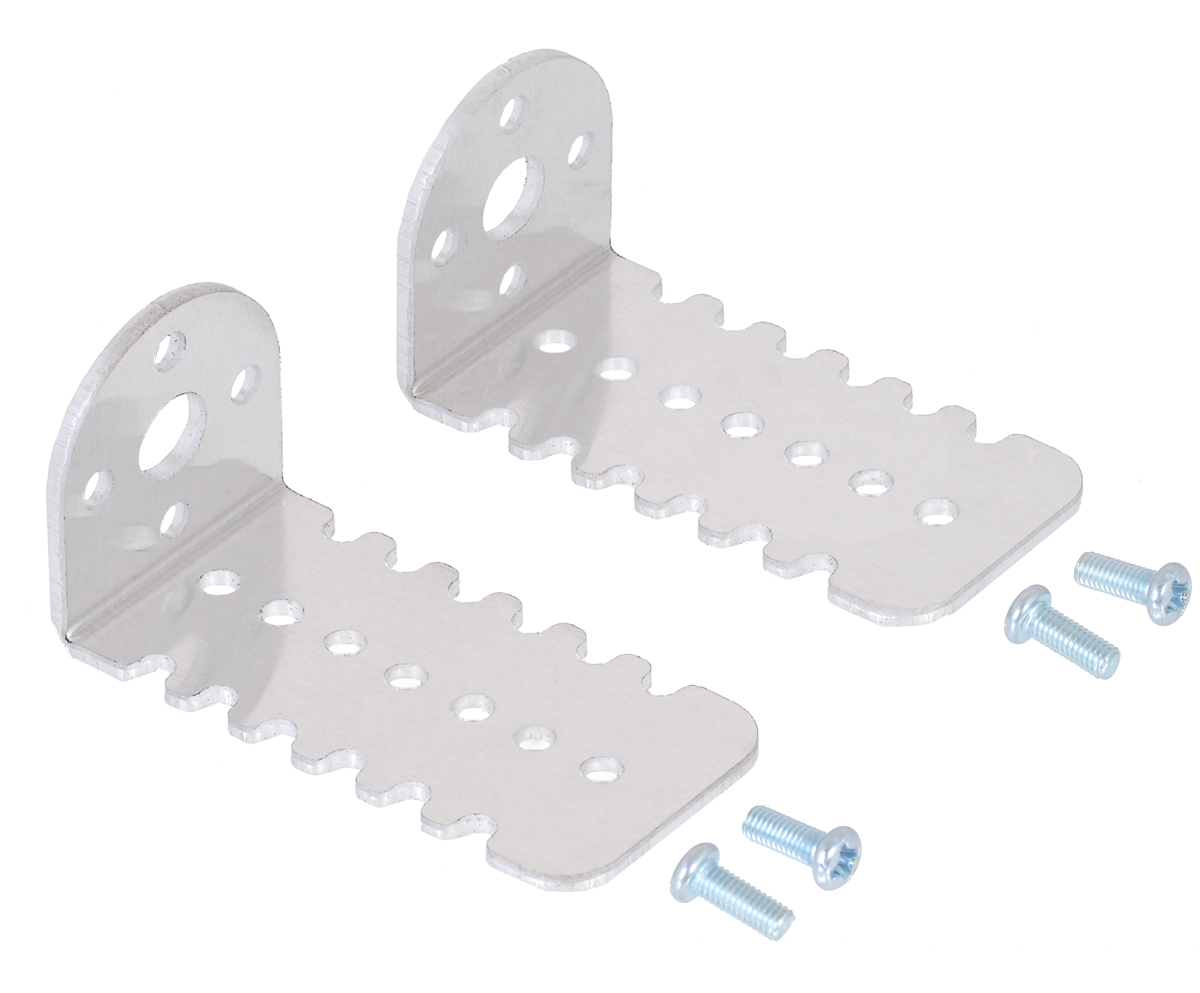
La placa frontal tiene dos orificios de montaje roscados para tornillos M3. Puede usar nuestro diseño personalizado Soporte de motorreductor de metal de 25D mm ( se muestra en la imagen a continuación ) para montar el motorreductor en su proyecto a través de estos orificios de montaje y los tornillos que vienen con el soporte.
|
|
El eje de salida de la caja de engranajes de 4 mm de diámetro funciona con Ruedas pololu multi-hub como se muestra en la imagen de la izquierda a continuación. Ese eje también funciona con el Buje de montaje de aluminio universal Pololu para ejes de 4 mm., que se puede usar para montar nuestro más grande Ruedas Pololu ( 60 mm-, 70 mm-, 80 mm- y 90 mm de diámetro ) o ruedas y mecanismos personalizados en el eje de salida del motorreductor como se muestra en la imagen de la derecha a continuación.
|
|


Alternativamente, podría usar nuestro Adaptador de rueda scooter de 4 mm para montar muchas ruedas comunes de scooter, skateboard y skate en línea en el eje de salida del motorreductor como se muestra en la imagen de la izquierda a continuación. Para un adaptador hexagonal de uso general, considere nuestro Adaptador de rueda hexagonal de 12 mm, que le permite usar este motor con muchas ruedas RC de hobby comunes como se muestra en la imagen de la derecha a continuación.
|
|


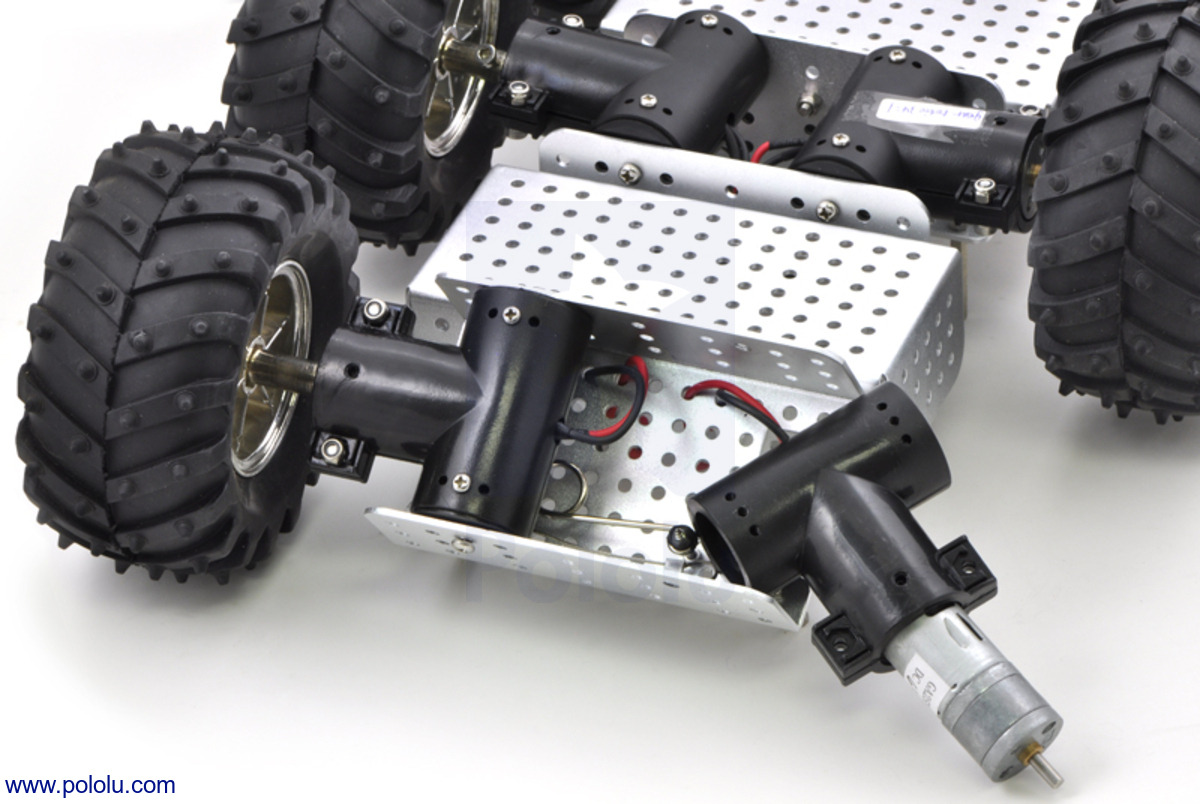
Estos son el mismo tipo de motores utilizados en el Chasis todo terreno Wild Thumper, por lo que el eje de salida de la caja de engranajes también funciona directamente con los adaptadores hexagonales incluidos con el diámetro de 120 mm Ruedas de golpeador salvaje como se muestra en la imagen a continuación:
 |
| Dagu Wild Thumper rueda 120 × 60 mm ( rojo metálico ) y motorreductor de metal Pololu 25D mm con codificador. |
|---|
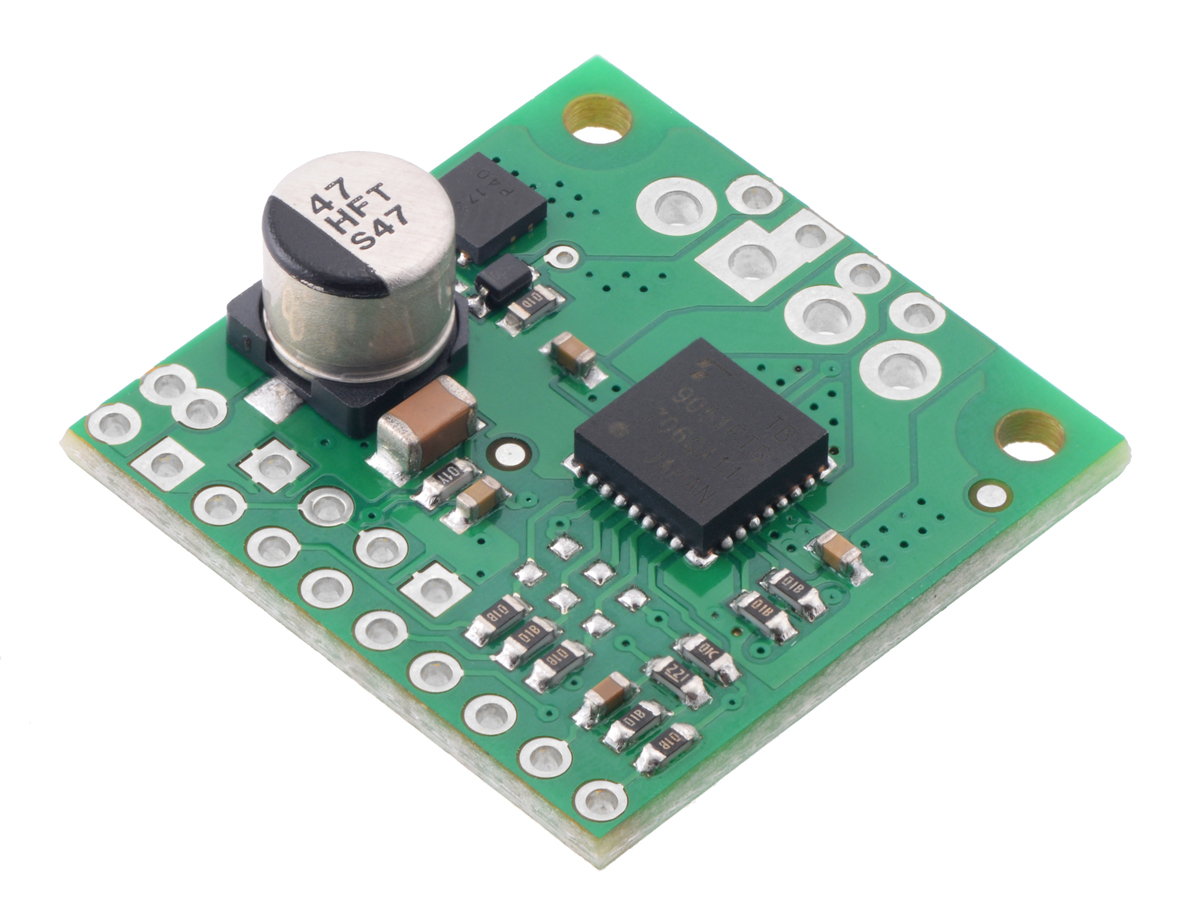
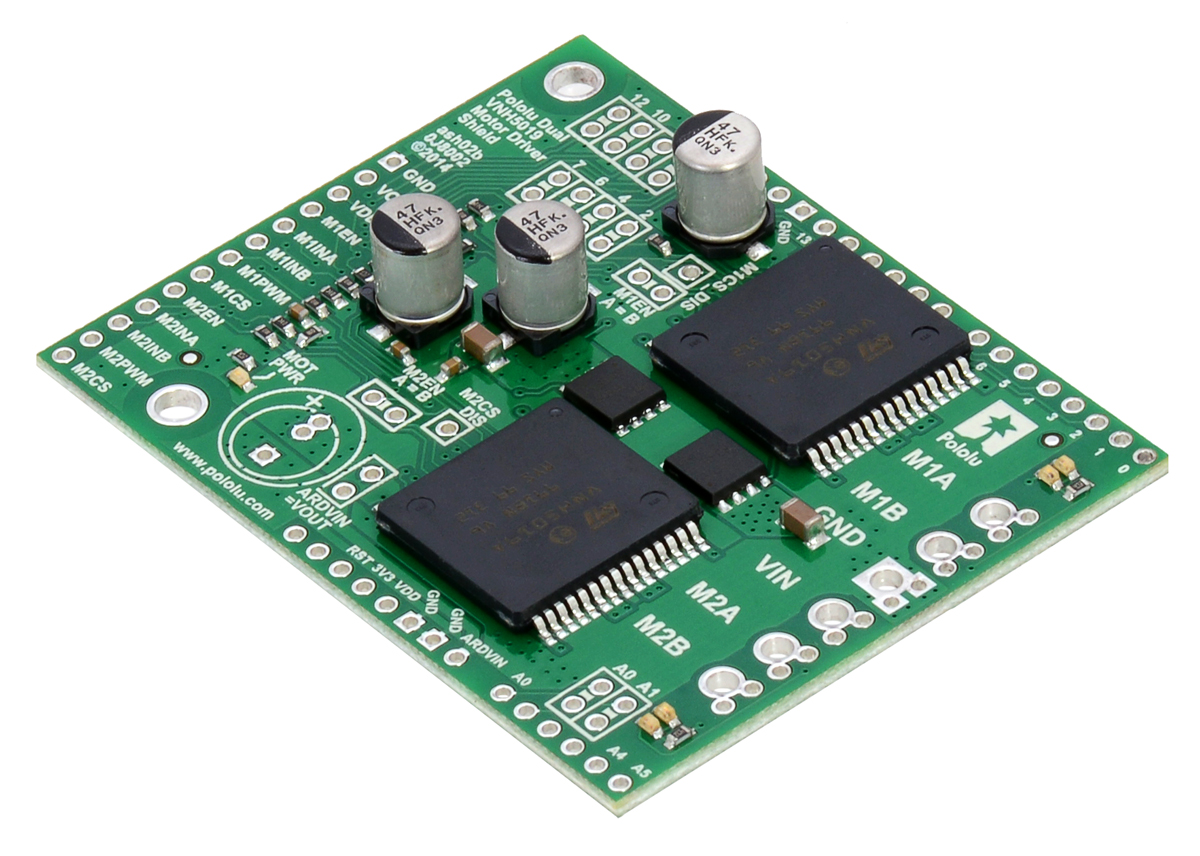
Tenemos un número de conductores de motor y controladores de motor que funcionan con estos motores de engranajes metálicos de 25D mm. Para las versiones LP y MP, recomendamos nuestros controladores basados en TB9051FTG, para los cuales tenemos un básico transportista único, una escudo de doble canal para Arduino, y un placa de expansión de doble canal para Raspberry Pi. Para las versiones HP, recomendamos nuestros controladores de motor basados en VNH5019 ( disponibles como soltero y transportistas duales), aunque estos también pueden ser una buena opción para los motores de menor potencia.
|
|
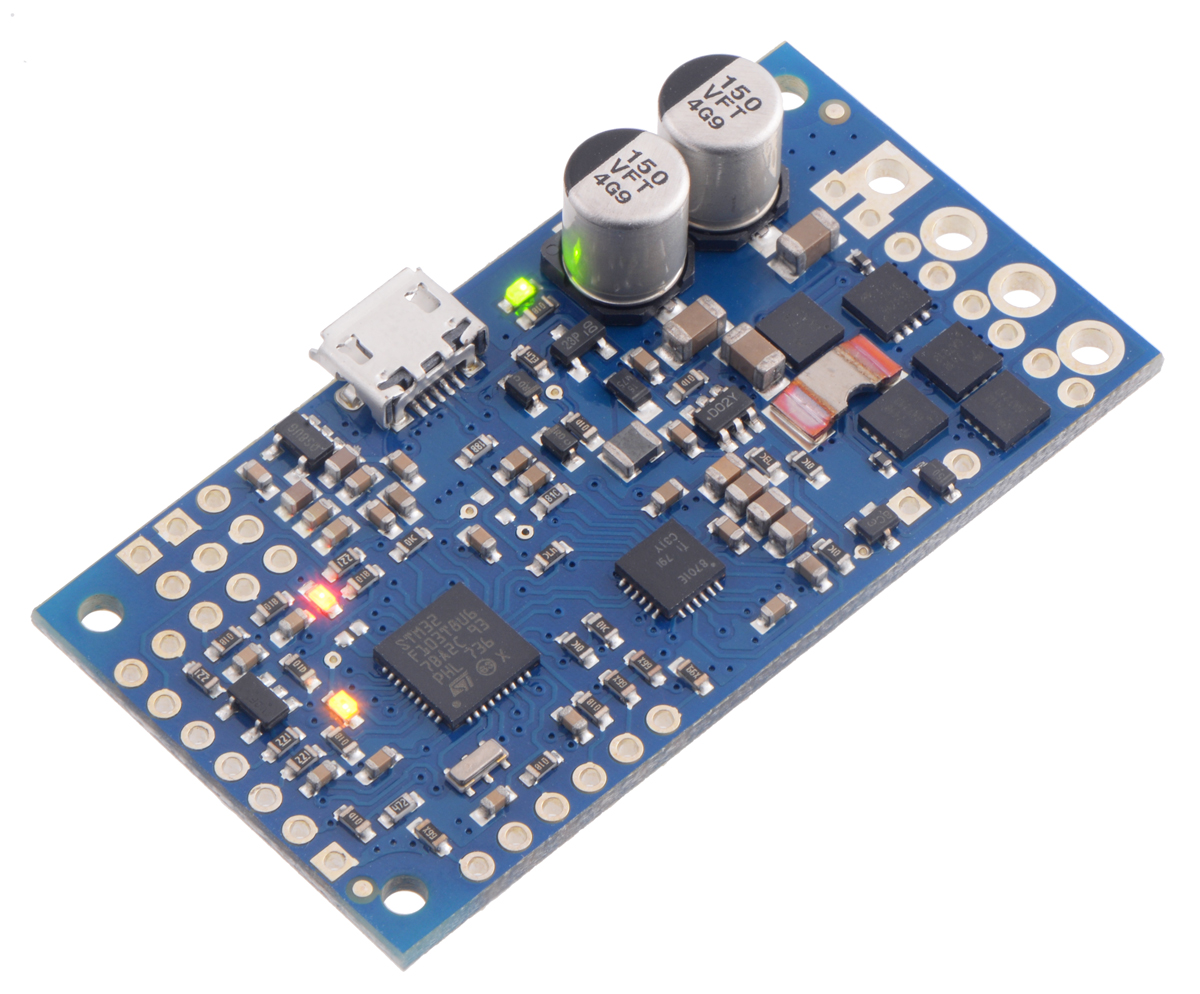
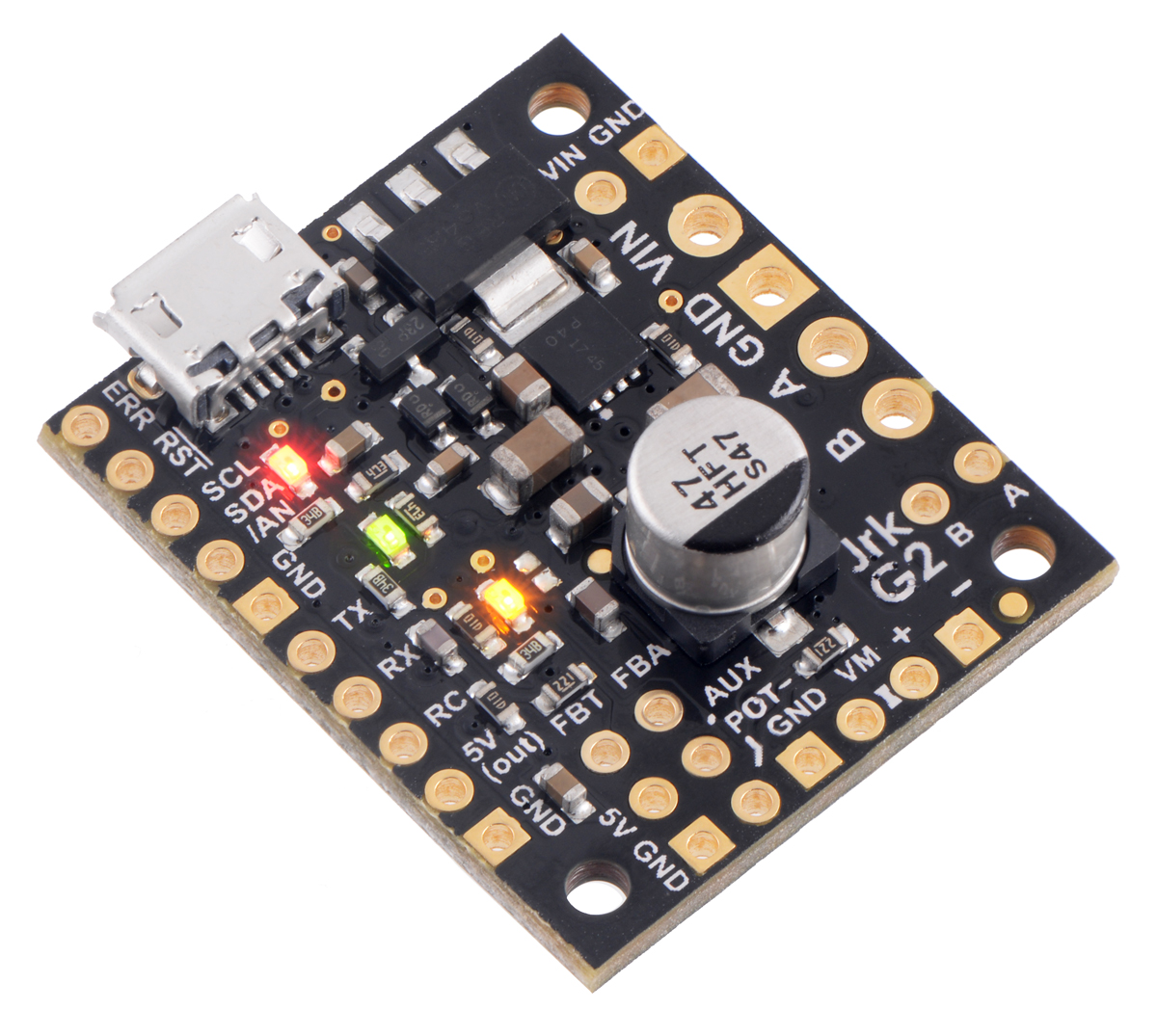
Si está buscando interfaces de control de nivel superior, como USB, RC, voltajes analógicos, I ² C o TTL serial, considere nuestro Controladores de motor simples, Controladores de motor Jrk, o Controladores de motor RoboClaw; estos controladores están disponibles en varios niveles de potencia, y el apropiado depende de la versión particular del motor de 25D mm que tenga (, generalmente recomendamos un controlador de motor que pueda manejar corrientes continuas por encima de la corriente de pérdida de su motor ).
|
|
|

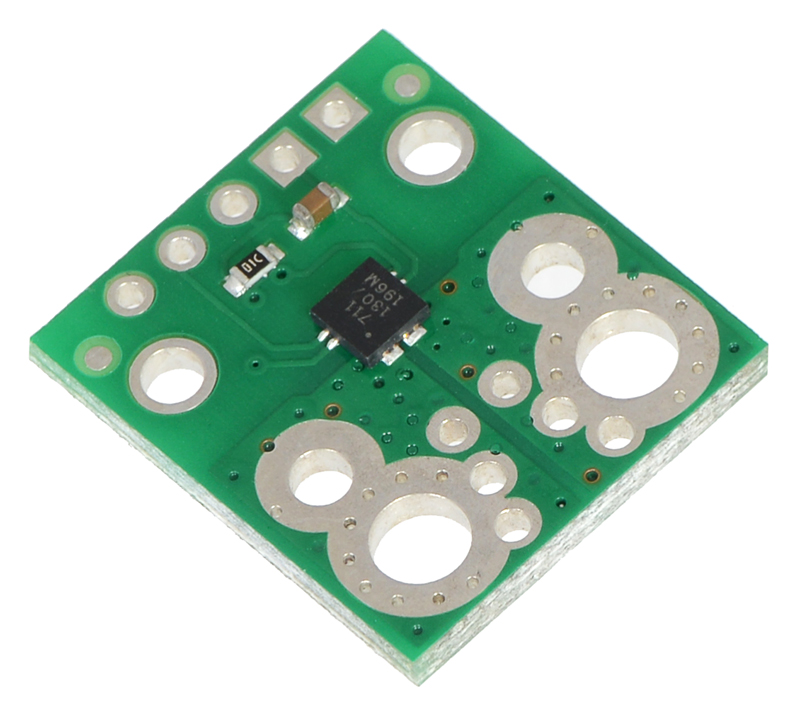
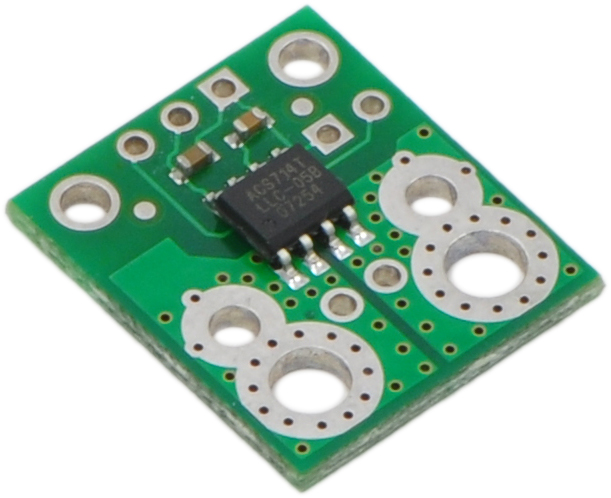
Tenemos una variedad de efectos de Hall basados sensores actuales para elegir para aquellos que necesitan monitorear la corriente del motor:
|
|
Selección del motorreductor correcto
Ofrecemos una amplia selección de motores de engranajes metálicos que ofrecen diferentes combinaciones de velocidad y par. Nuestro mesa de comparación de motorreductor de metal puede ayudarlo a encontrar el motor que mejor cumpla con los requisitos de su proyecto.
 |



Valoraciones
No hay valoraciones aún.