


Descripción
Agregue codificadores de cuadratura a los mini motores de engranajes de plástico en su chasis Romi con este kit que utiliza un disco magnético y sensores de efecto Hall para proporcionar 12 recuentos por revolución del eje del motor. Los sensores funcionan de 3.5 V a 18 V y proporcionan salidas digitales que se pueden conectar directamente a un microcontrolador u otro circuito digital.
Resumen
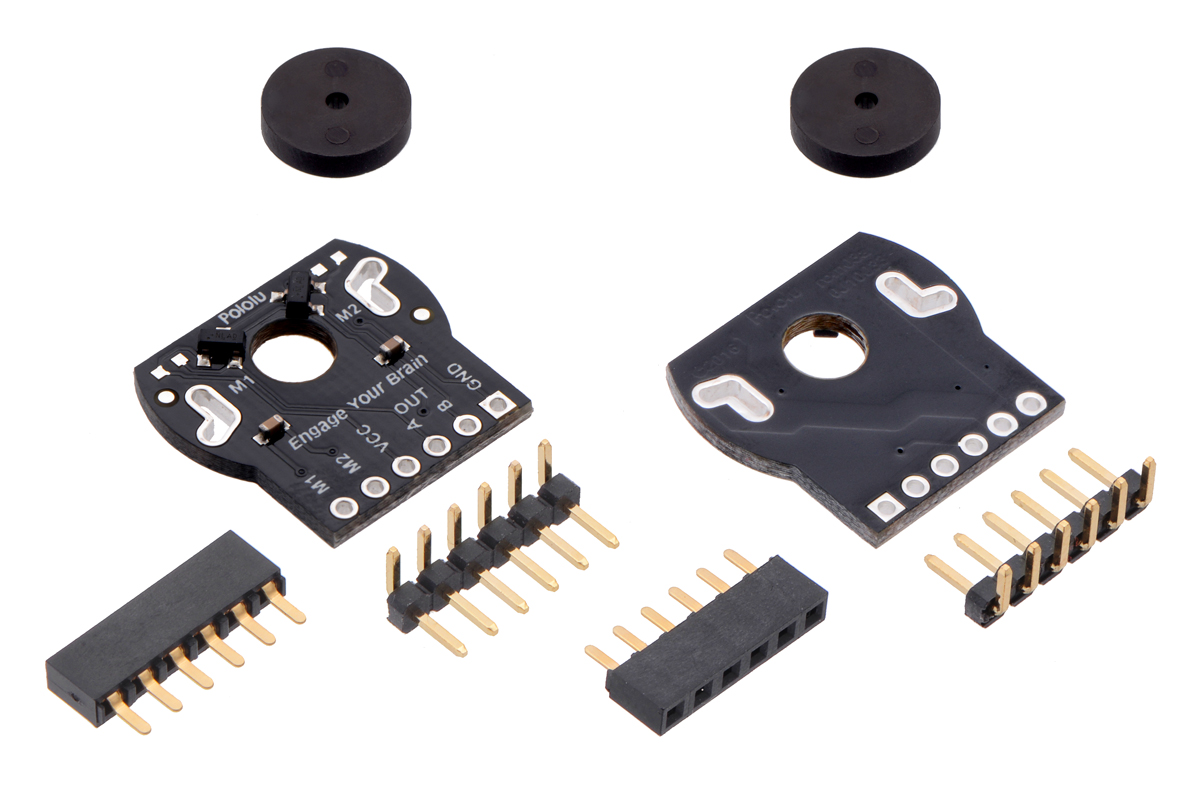
Este kit incluye dos placas de sensores de efecto Hall de doble canal y dos Discos magnéticos de 6 polos que se puede usar para agregar codificación de cuadratura a los mini motores de engranajes de plástico en un Chasis Romi. El tablero codificador detecta la rotación del disco magnético y proporciona una resolución de 12 recuentos por revolución del eje del motor al contar ambos bordes de ambos canales, que corresponde a aproximadamente 1440 recuentos por revolución de las ruedas de Romi.
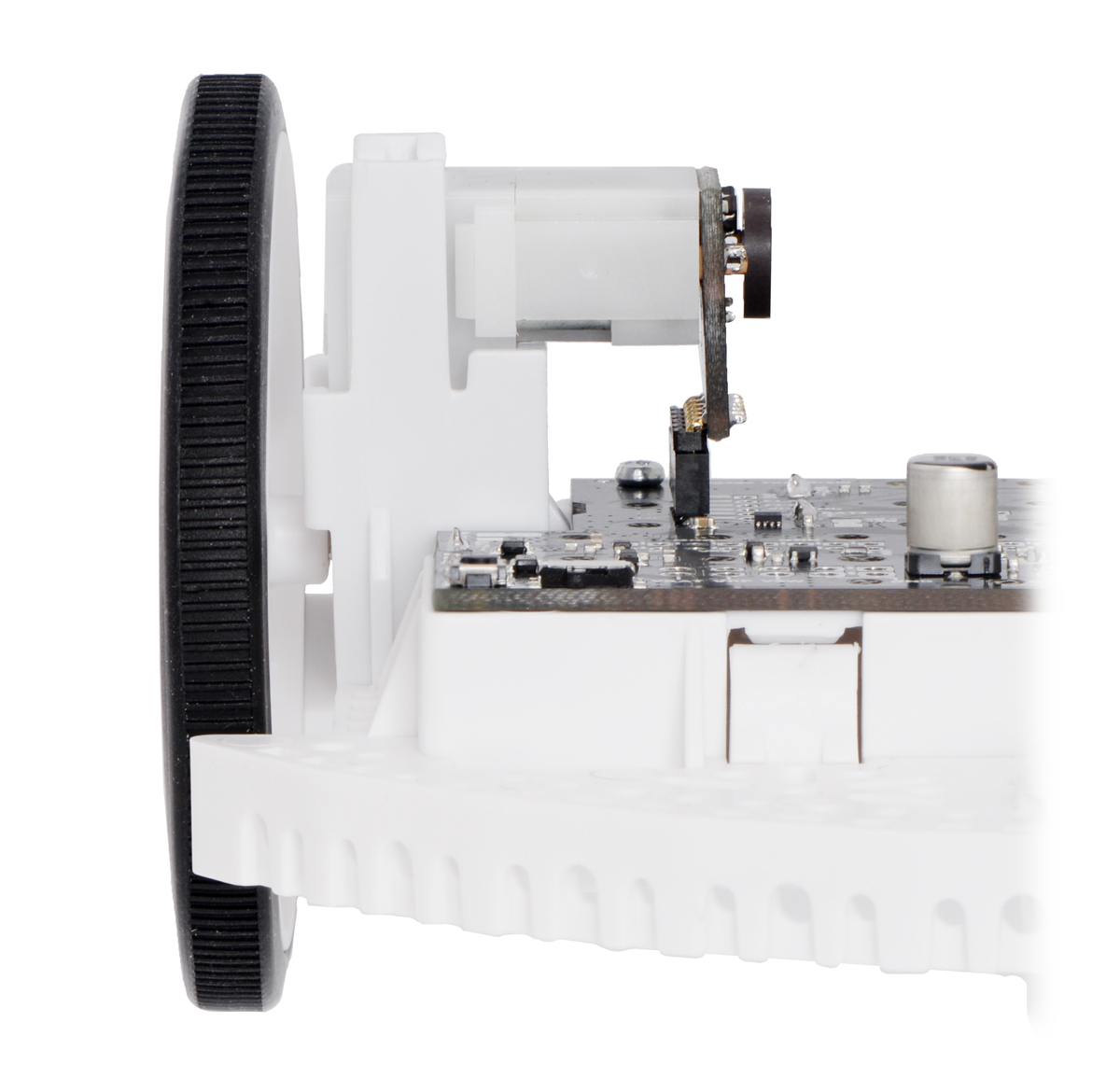
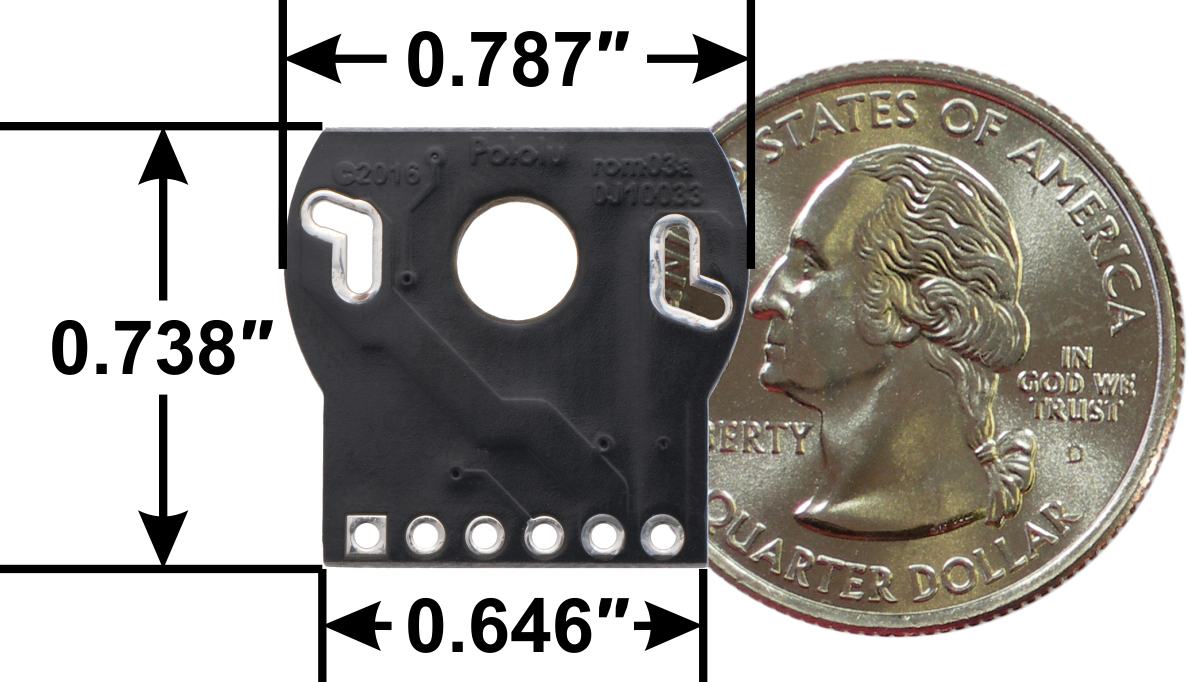
Esta solución de codificador compacto se adapta a la sección transversal de 11,5 mm × 22,5 mm de la parte trasera de los motores en tres de los cuatro lados. El cuarto lado del codificador tiene la señal y las conexiones de alimentación, y se extiende 7 mm más allá del borde del motor para que esté a la altura correcta para poder enchufarlo a una placa montada debajo del chasis Romi cuando Se utilizan los pasadores de cabeza de perfil masculino y femenino de bajo perfil. El conjunto no se extiende más allá del extremo del eje del motor extendido, que sobresale 5 mm más allá de la parte posterior del motor.
Pinout e instalación
La placa de codificador está diseñada para soldarse directamente en la parte posterior del motor, con el eje posterior del motor sobresaliendo a través del orificio en el medio de la placa de circuito. Una forma de lograr una buena alineación entre el tablero y el motor es clavar el tablero en un pasador del motor y soldar el otro pasador solo cuando el tablero es plano y bien alineado. Tenga cuidado de evitar el calentamiento prolongado de los pasadores del motor, que podrían deformar la carcasa del motor o los cepillos.
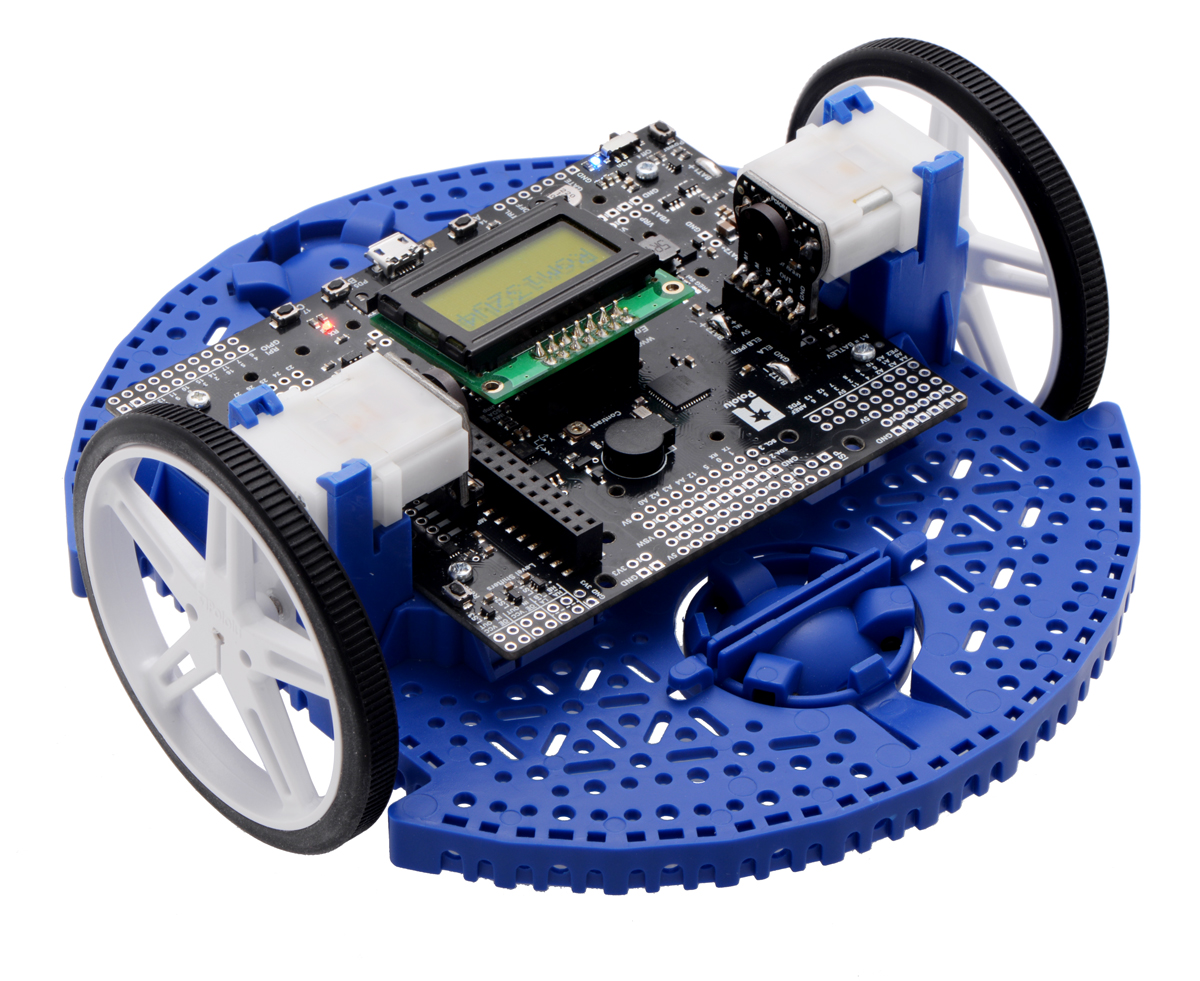
Actualmente tenemos dos placas en las que estos codificadores pueden conectarse directamente: el Junta de control Romi 32U4 y el Controlador de motor y placa de distribución de energía para Romi Chassis. Los pasadores del codificador deben instalarse apuntando hacia abajo hacia el chasis para poder enchufarlos a esta placa.
|
|
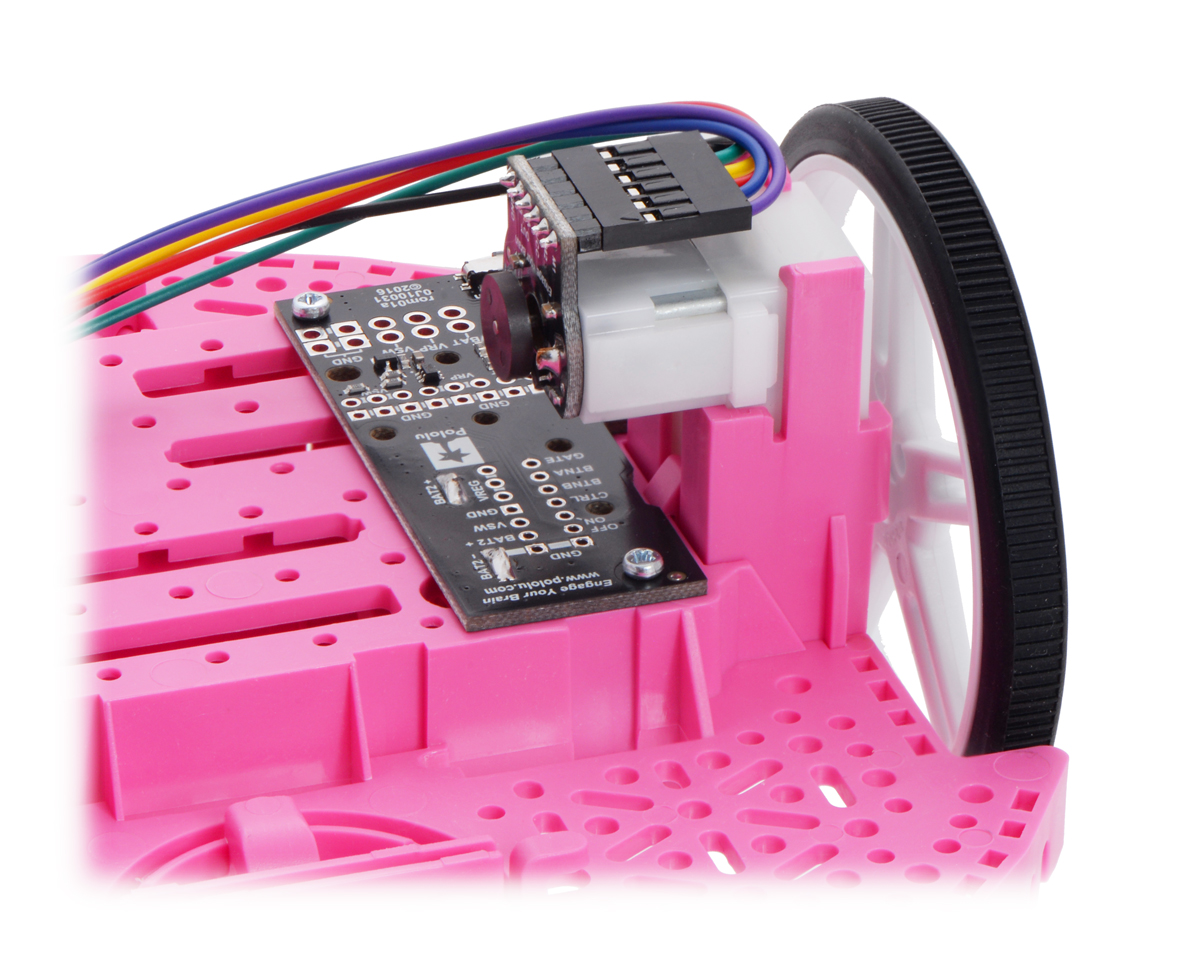
Para los robots que no usan estas placas, podría ser más conveniente instalar la placa y los pasadores hacia arriba y conectarlos con un cable hecho de nuestro cables con terminales pre-crimpados.
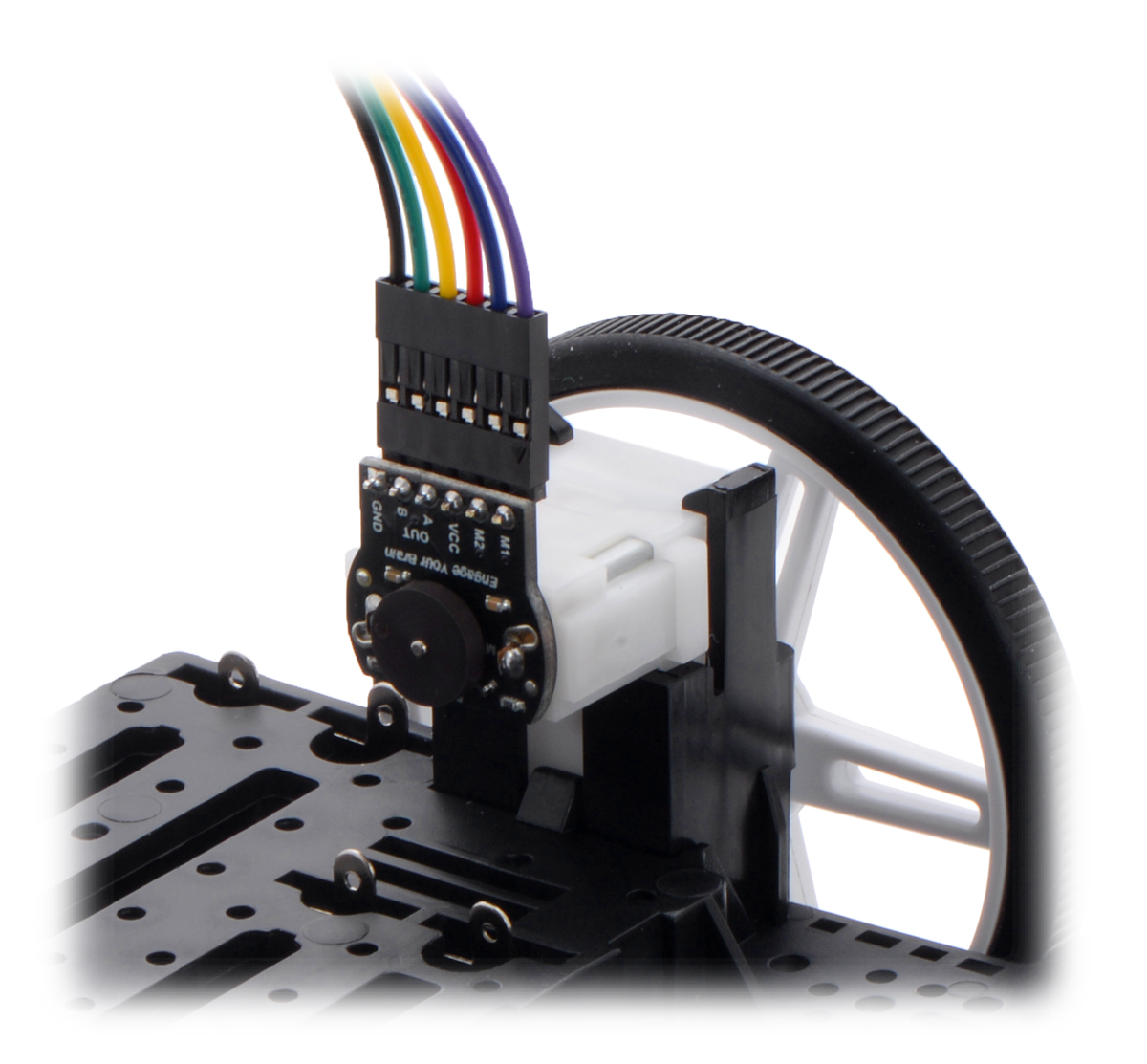 |
| Los encabezados de bajo perfil incluidos todavía son lo suficientemente largos como para trabajar con nuestros cables de puente pre-engarzados. |
|---|
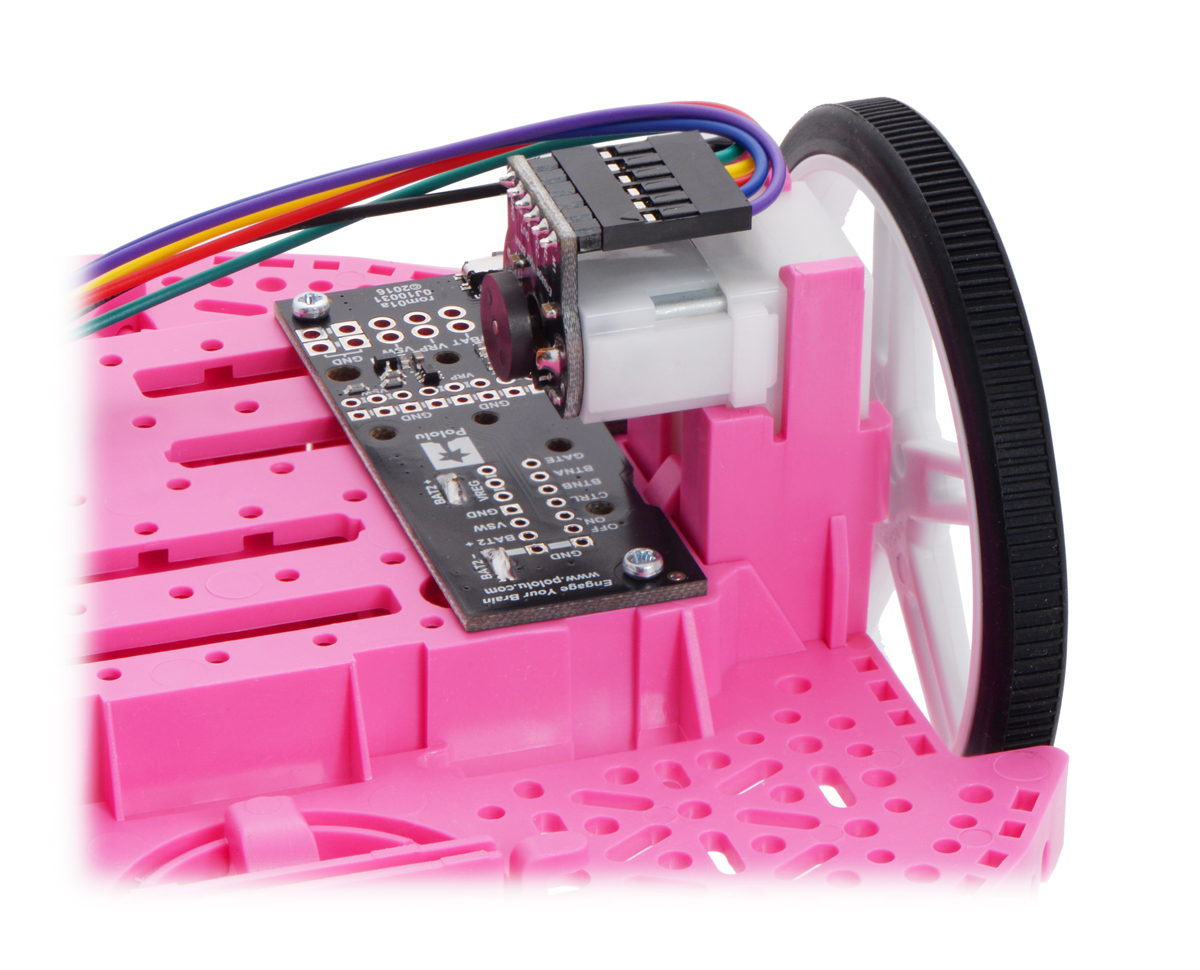
Para luego usar los mismos codificadores con una placa en la que pueden enchufarse, simplemente retire la parte del motor de la caja de cambios, gire 180 °, y empujarlo hacia adentro para hacer que el codificador y los pines apunten hacia abajo.
|
|


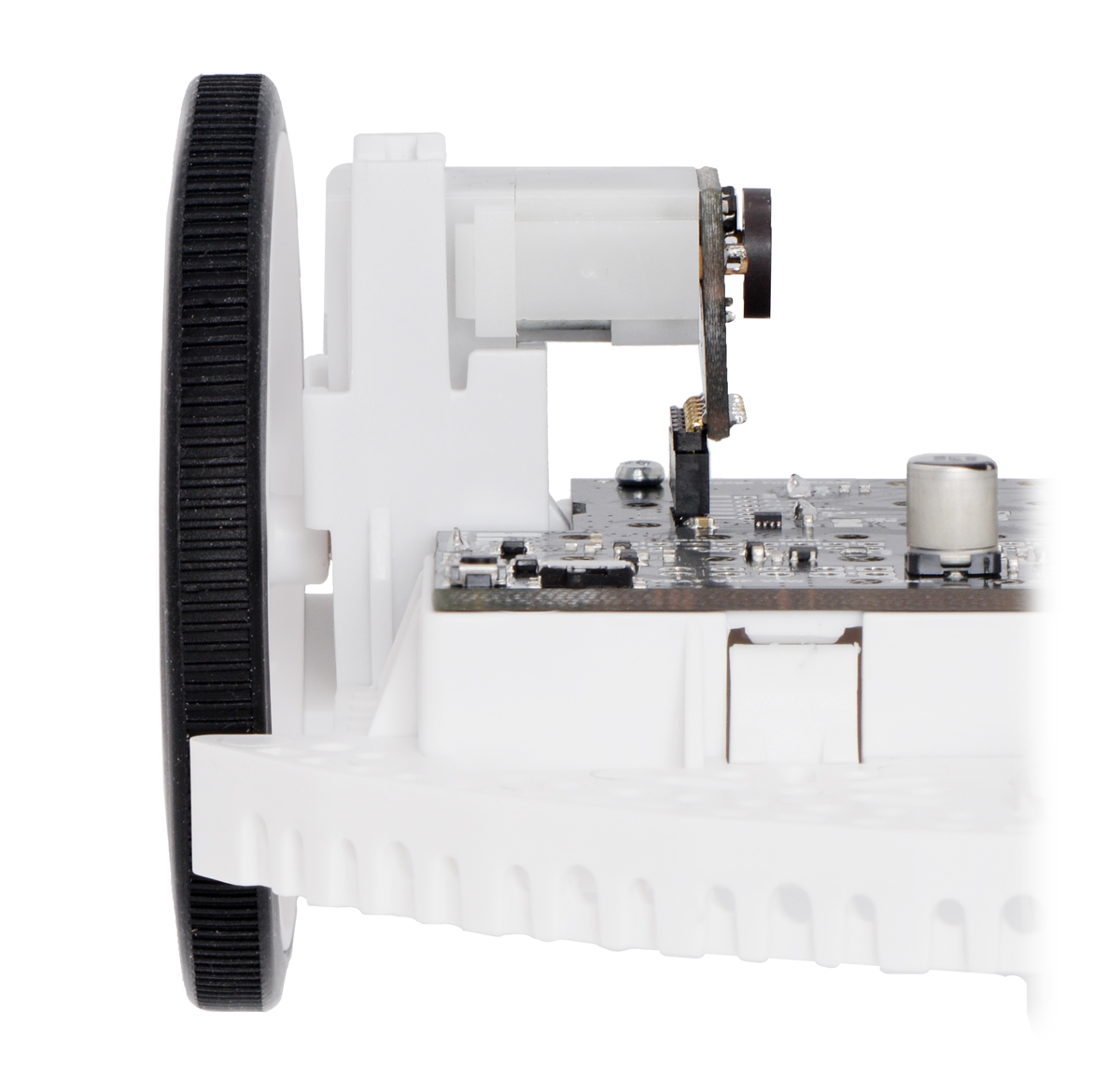
Si no le importa la compatibilidad con tableros existentes o potenciales futuros, le recomendamos soldar cables directamente al codificador o instalar un encabezado masculino de longitud estándar que funciona mejor con cables hechos de nuestros cables con terminales pre-engarzados.
 |
| Un encabezado macho recto de 0.1 ″ de longitud estándar permite una conexión de cable compacta. |
|---|
Una vez que el tablero se suelda a las dos terminales, los cables del motor se conectan a las almohadillas M1 y M2 a lo largo del borde del tablero; los cuatro pads restantes se utilizan para alimentar los sensores y acceder a las dos salidas de cuadratura:
|
|

Los sensores se alimentan a través de los pines VCC y GND. VCC puede ser de 3.5 V a 18 V, y las salidas de cuadratura A y B son señales digitales de drenaje abierto que deben elevarse al voltaje lógico apropiado de su sistema. Las placas codificadoras tienen almohadillas para resistencias opcionales de montaje en superficie de tamaño 0603 para tirar de las salidas hasta VCC, pero en aplicaciones típicas, las resistencias pull-up estarán en la placa electrónica principal.
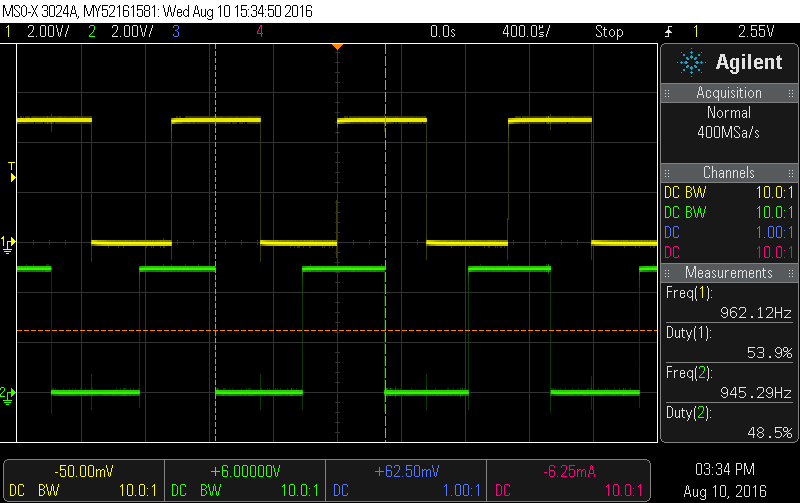 |
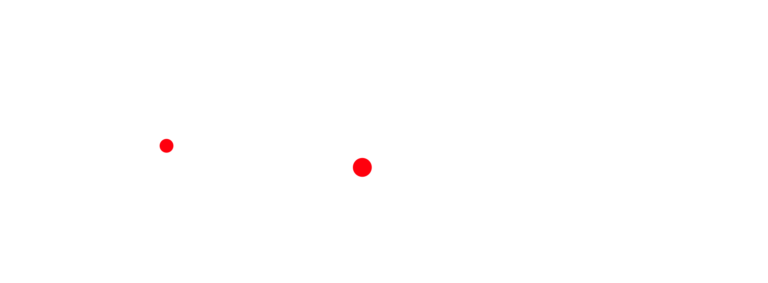
| Encodificador A y B salidas de un codificador magnético en un motorreductor mini plástico de alta potencia ( HP ) que funciona a 4.5 V. |
|---|
Los seis orificios pasantes de la placa tienen un paso de 0.1 ″ ( 2.54 mm ), por lo que son compatibles con conectores comunes de 0.1 ″, o simplemente puede soldar cables individuales directamente a la placa.
Una vez que la placa se suelda al motor, el disco del codificador magnético se puede empujar hacia el eje del motor. Una manera fácil de lograr esto es presionar el motor sobre el disco mientras está sentado sobre una superficie plana, empujando hasta que el eje haga contacto con esa superficie. El tamaño del espacio entre el disco del codificador y la placa del sensor no tiene un gran impacto en el rendimiento siempre que el eje del motor esté al menos en todo momento disco.
Diagrama esquemático
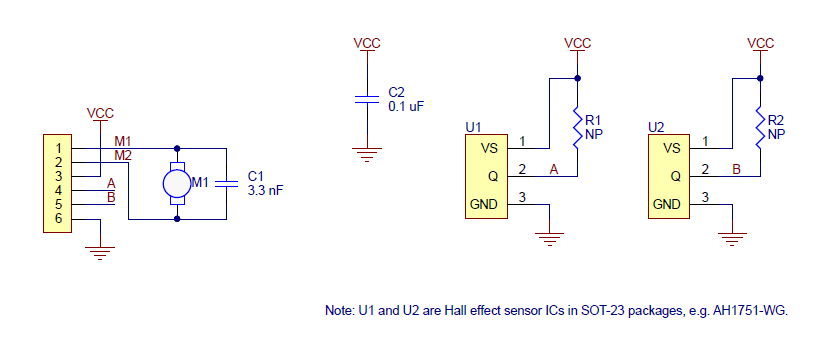 |
Este esquema también está disponible como pdf descargable ( 88k pdf ).



Valoraciones
No hay valoraciones aún.