



Descripción
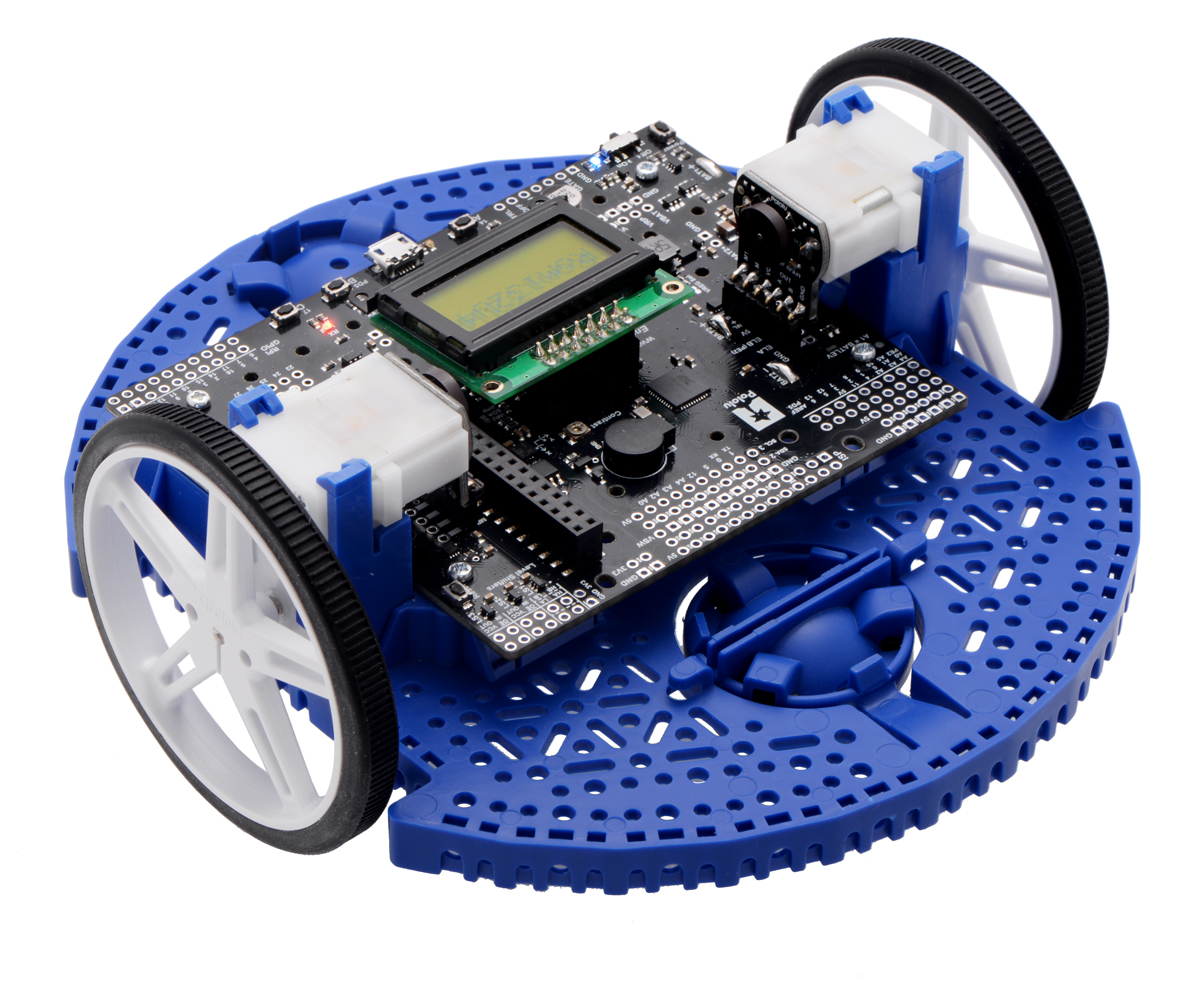
La placa de control Romi 32U4 convierte el chasis Romi en un robot programable basado en la MCU ATmega32U4 compatible con Arduino. Sus características incluyen controladores integrados de doble motor, un circuito de alimentación versátil y sensores inerciales, así como conexiones para codificadores de cuadratura y una pantalla LCD opcional. La placa también tiene la capacidad de interactuar con una Raspberry Pi adicional, lo que hace que la base de un robot Romi completo controlado por Raspberry Pi.
Resumen
La placa de control Romi 32U4 está diseñada para ensamblarse con un Chasis Romi para crear una plataforma robot integrada capaz que pueda programarse y personalizarse fácilmente.
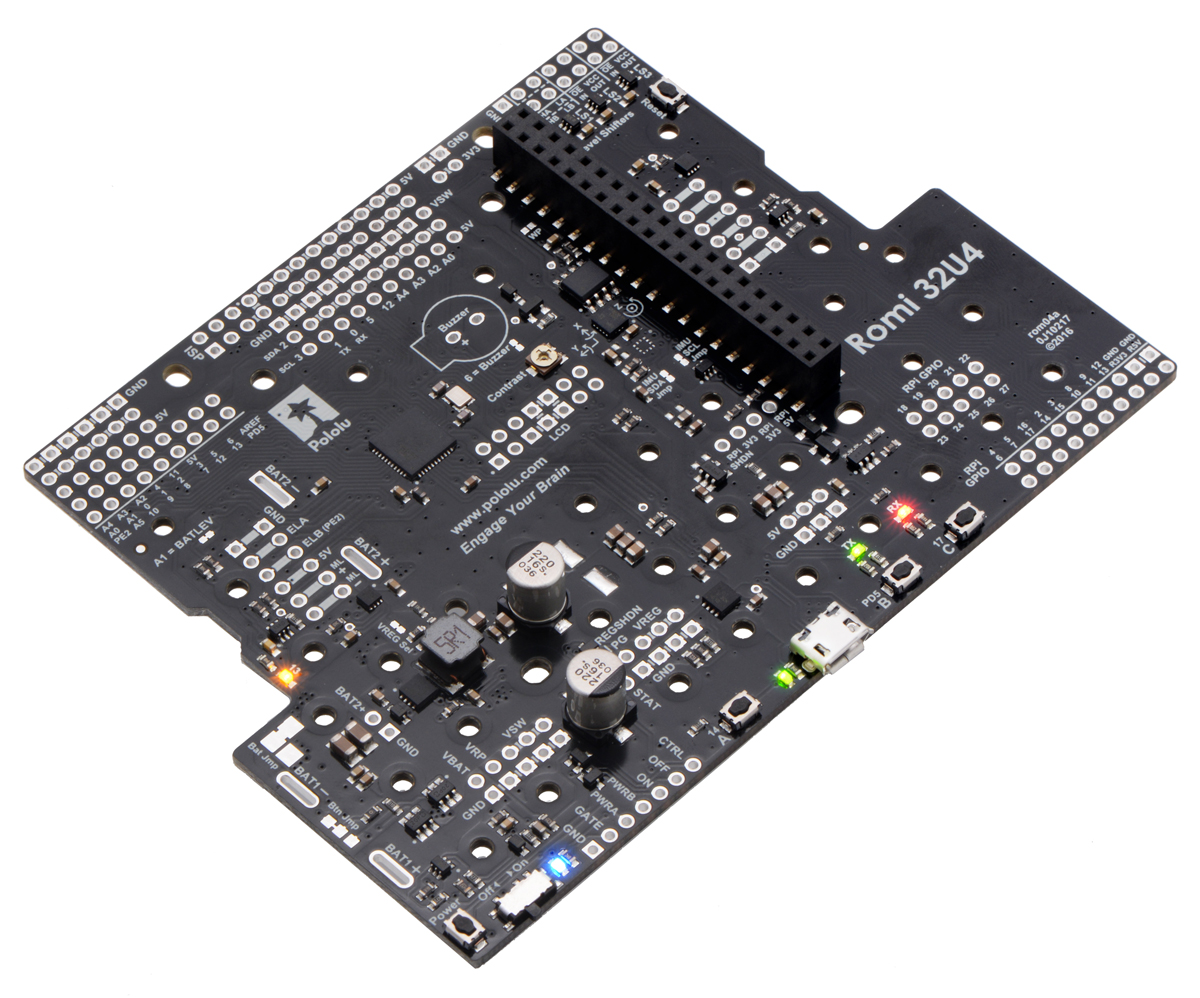
Como nuestro Controladores programables A-Star 32U4, la placa de control Romi 32U4 está construida alrededor de un microcontrolador ATmega32U4 AVR habilitado para USB de Microchip ( anteriormente Atmel ), y se envía precargado con un cargador de arranque compatible con Arduino. La placa de control presenta dos controladores de motor H-bridge y está diseñada para conectarse a un Romi Encoder Pair Kit( disponible por separado ) para permitir el control del motor de circuito cerrado. También incluye un potente regulador reductor de conmutación de 5 V que puede suministrar hasta 2 A continuamente, junto con un versátil circuito de conmutación y distribución de energía. Un acelerómetro y giroscopio de 3 ejes permiten que un robot Romi 32U4 realice mediciones inerciales, calcule su orientación y detecte fuerzas externas. Tres botones integrados ofrecen una interfaz conveniente para la entrada del usuario, mientras que los LED indicadores, un timbre y un conector para una pantalla LCD opcional permiten que el robot proporcione comentarios.
La placa de control Romi 32U4 se puede usar como una solución de control independiente o como base para un controlador Raspberry Pi más potente. Su conector a bordo y sus orificios de montaje permiten un Raspberry Pi compatible ( Modelo B + o más nuevo, incluido Pi 3 Modelo B + y Modelo A +) para enchufarlo directamente en la placa de control. Los desplazadores de nivel integrados facilitan la configuración de la comunicación I ² C y la interfaz de otras señales entre los dos controladores, y la placa de control suministra automáticamente una alimentación de 5 V a una Raspberry Pi adjunta. En esta configuración, el Raspberry Pi puede manejar el control del robot de alto nivel mientras confía en la placa de control Romi 32U4 para tareas de bajo nivel, como motores en marcha, codificadores de lectura, e interfaz con otros dispositivos analógicos o sensibles al tiempo.
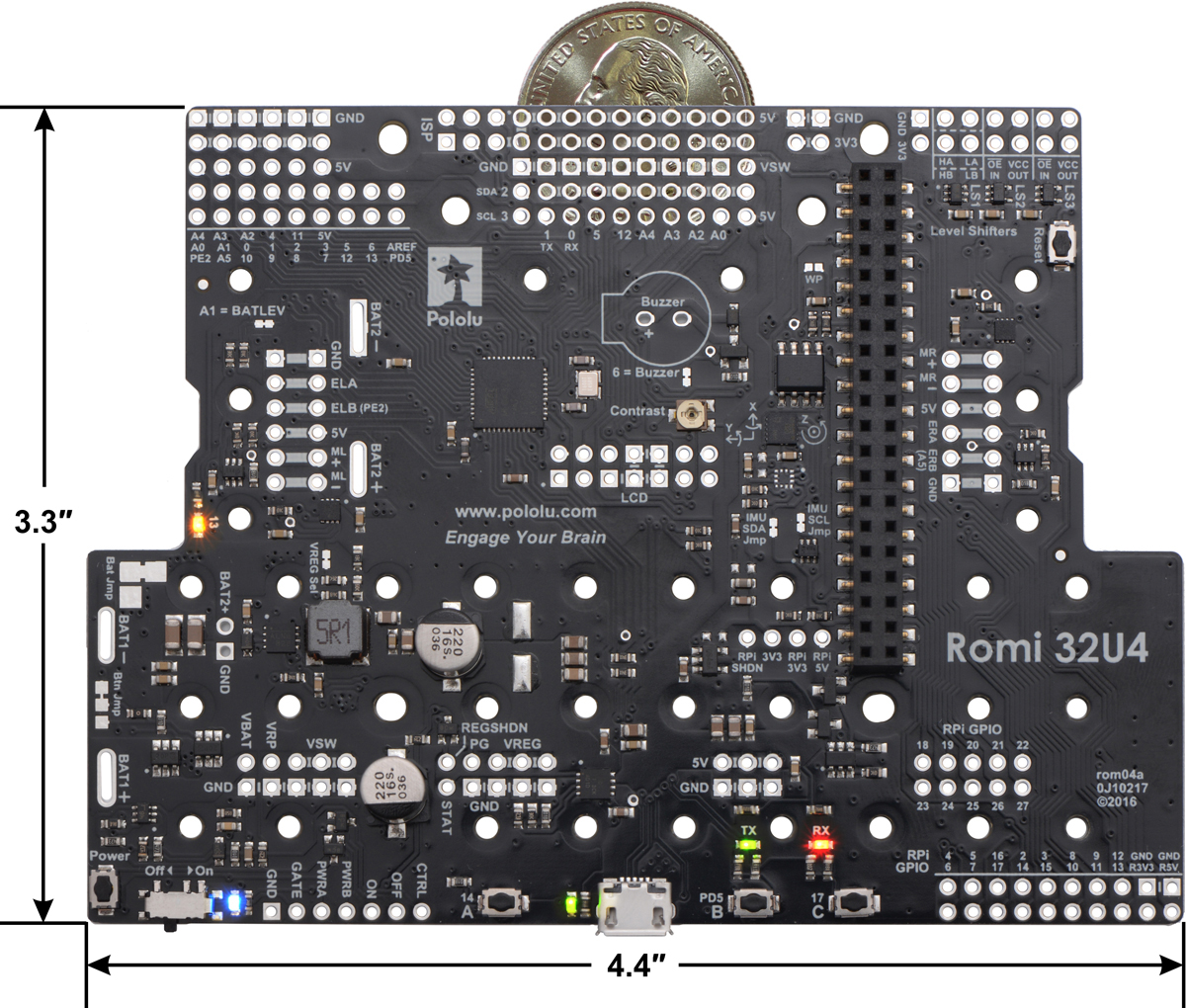
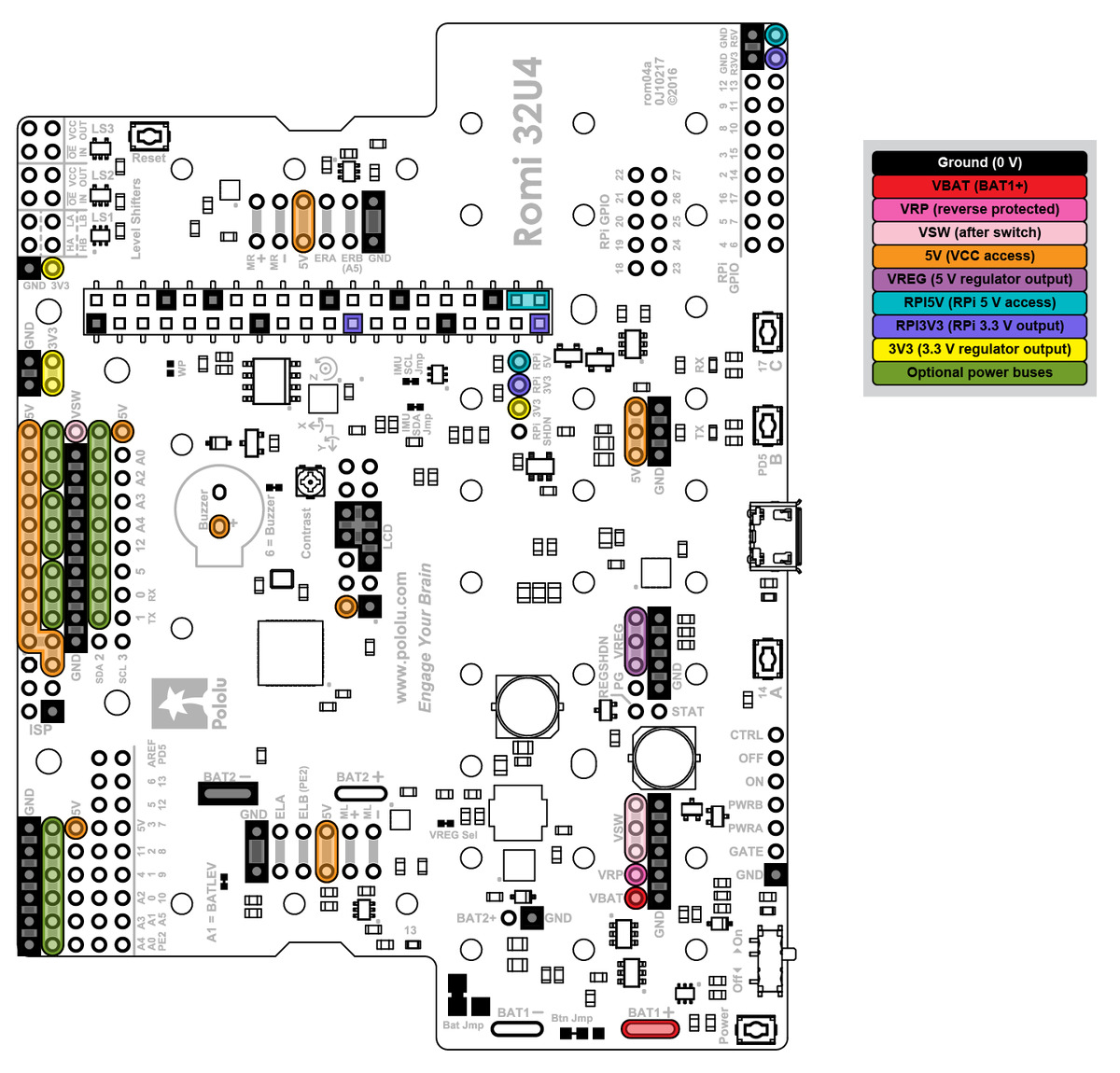
Las líneas de E / S tanto del ATmega32U4 como del Raspberry Pi se dividen en agujeros pasantes espaciados de 0.1 ″ a lo largo de la parte delantera y trasera del tablero de control, y los rieles de alimentación de la placa son de acceso similar, lo que permite conectar fácilmente sensores y otros periféricos.
Hay un complemento de software disponible que facilita la programación de un robot Romi 32U4 desde el entorno Arduino, y tenemos bibliotecas Arduino y bocetos de ejemplo para ayudarlo a comenzar. A Cable USB A a Micro-B ( no incluido ) es necesario para la programación.
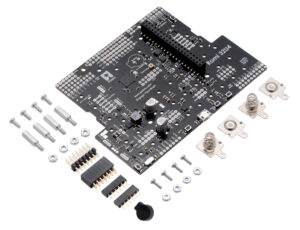
Componentes incluidos
La placa de control Romi 32U4 se envía con todos sus componentes de montaje en superficie poblados, e incluye una serie de piezas de orificio pasante y hardware de montaje, como se muestra en la imagen de arriba. Tenga en cuenta que se requiere un montaje ( que incluya soldadura ); por favor vea el guía del usuario para instrucciones de montaje.
El chasis Romi en sí y otras partes necesarias para construir un robot Romi 32U4 completo son no incluido; estos se enumeran a continuación, junto con algunas adiciones opcionales.



Valoraciones
No hay valoraciones aún.