
Descripción
Interfaz de programación abierta e interfaz extendida
El programa de control del manipulador y la interfaz de control se abrirán sucesivamente y se podrán reemplazar rápidamente diferentes actuadores al final del manipulador.

Aplicación
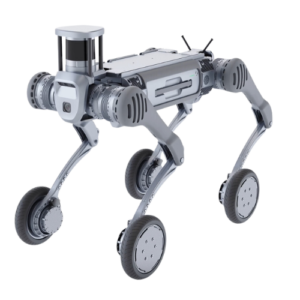
Manipulador a bordo de varios robots móviles, logística de comercio electrónico, nuevos consumos, vida diaria, etc.

| Función | Parámetro | |
|---|---|---|
| Reacción | ~6 arcmin | |
| Torque máxima | 33N·m | |
| Peso | 405 g | |
| Tamaño | Φ65*52mm | |
| Reductor | Reductor Armónico | |
| Relación de reducción | +60 | |
| Voltaje | 24 V (recomendado) | |
| Método de comunicación | RS 485 | |
| Resolución del codificador | 15 bits | |
| Precisión del control de fuerza | ~0.2N·m | |
| Frecuencia de control | 1 KHz | |
| Cojinete | Rodillo transversal de grado industrial | |
| Retroalimentación de detección del motor | Torque, ángulo, velocidad angular | |
| Comando de control de motores | Par, ángulo, velocidad angular, rigidez, amortiguación | |
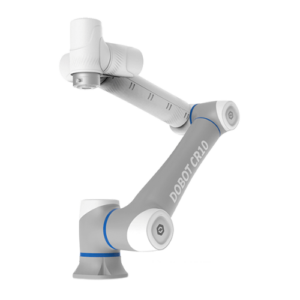
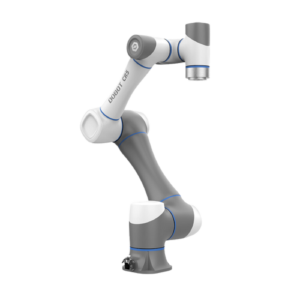
Especificaciones
| Grados de libertad | 6 ejes | |
|---|---|---|
| Peso | 4.5kg | |
| Carga útil | ≥3kg | |
| Alcance | 740mm | |
| Repetibilidad [1] | ~0.1mm | |
| Fuente de alimentación | Voltaje 24V Corriente > 20A | |
| Interfaz | Ethernet | |
| Sistema operativo del usuario | Ubuntu | |
| Potencia | MAX 500w | |
| Retroalimentación y detección de colisiones | Proporciona | |
| Interfaz de control [2] | Posición + Control de fuerza | |
Parámetros de las articulaciones
| Articulación | Rango | Velocidad Máxima |
|---|---|---|
| J1 | ±150° | 180°/s |
| J2 | 0-180° | 180°/s |
| J3 | -165°-0 | 180°/s |
| J4 | ±80° | 180°/s |
| J5 | ±85° | 180°/s |
| J6 | ±160° | 180°/s |
Nota
[1] Depende de la prueba real según los requisitos de uso (los estándares de prueba del manipulador varían mucho y la precisión varía mucho bajo diferentes condiciones de prueba).
[2] Dado que la relación de reducción utilizada por cada articulación es relativamente baja, la rigidez del control de posición de toda la máquina es baja. Si el modo de control no está optimizado, se producirán grandes errores de control de posición y sacudidas cuando el manipulador se mueva.
Medidas


Valoraciones
No hay valoraciones aún.