Descripción
Características Clave:
-
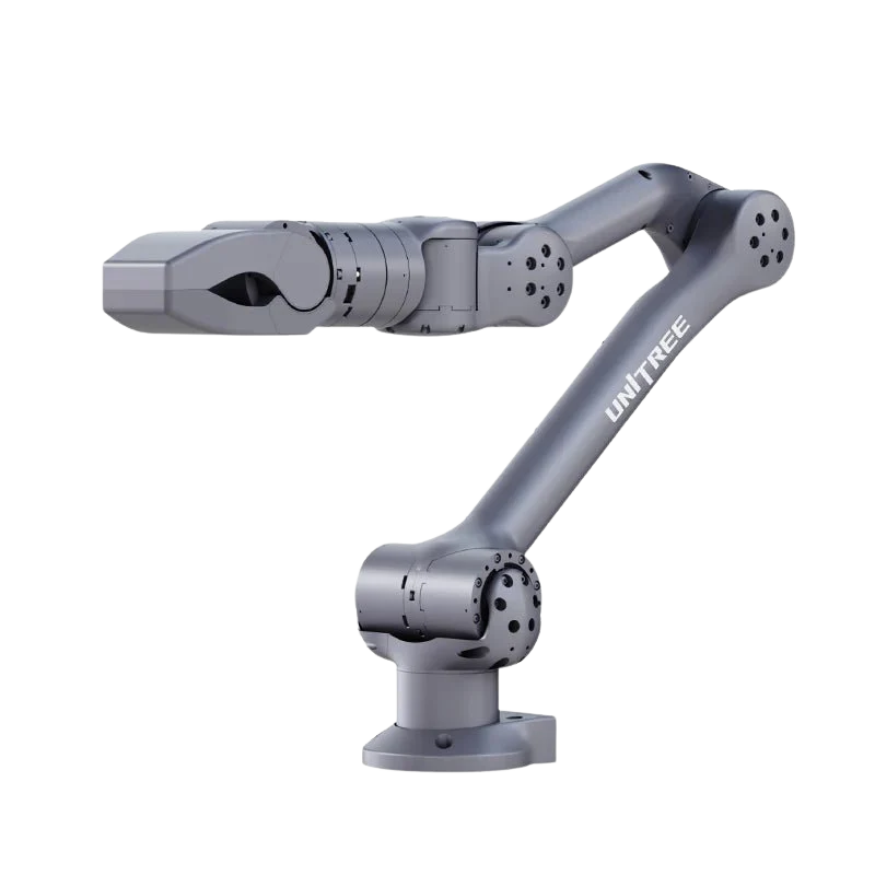
Altos Grados de Libertad: Ambos modelos cuentan con articulación de 6 ejes, permitiendo movimientos complejos y fluidos que imitan la destreza del brazo humano.
-
Capacidad de Carga Robusta:
-
Z1 Pro:
-
Soporta de 3 a 5 kg, ideal para aplicaciones de servicio más pesado.
-
Componentes de mayor rendimiento
-
Equipado con sistema de refrigeración por aire.
-
-
-
Componentes de Alto Rendimiento: Equipados con sistema de refrigeración por aire.
-
Alcance Extendido: Un alcance de 740 mm permite a los brazos realizar tareas en un amplio espacio de trabajo, mejorando la flexibilidad operativa.
-
Precisión y Repetibilidad: Logra una repetibilidad de aproximadamente 0.1 mm.
-
Sistemas de Control Avanzados: Soporta modos de control tanto de posición como de fuerza, con detección de colisiones y retroalimentación de fuerza.
-
Interfaz de Programación Abierta: Compatible con el sistema operativo Ubuntu y ofrece un SDK abierto.
Especificaciones
| Grados de libertad | 6 ejes |
| Peso | 4.5 kg |
| Capacidad de carga útil | 3–5 kg |
| Alcance | 740 mm |
| Repetibilidad | ~0.1 mm |
| Fuente de alimentación | 24V, >20A |
| Consumo máximo de energía | 500 W |
| Interfaz | Ethernet |
| Sistema operativo | Ubuntu |
| Modos de control | Control de posición y fuerza |
| Detección de colisiones | Si |
| Velocidad conjunta | Hasta 180°/s |
| Torque máximo de articulación | 33 N·m |
| Resolución del encoder | 15-bit |
| Método de comunicación | RS-485 |
| Precisión del control de fuerza | ~0.2 N·m |
| Reacción | ~6 arcmin |
| Reductor | Reductor Armónico |
| Cojinete | Rodillo transversal de grado industrial |
| Relación de reducción | 60+ |
| Retroalimentación de detección del motor | Torque, ángulo, velocidad angular |
| Comandos de control de motores | Par, ángulo, velocidad angular, rigidez, amortiguación |

Valoraciones
No hay valoraciones aún.