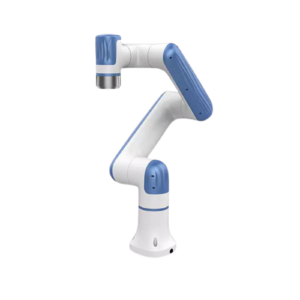
Descripción
Características
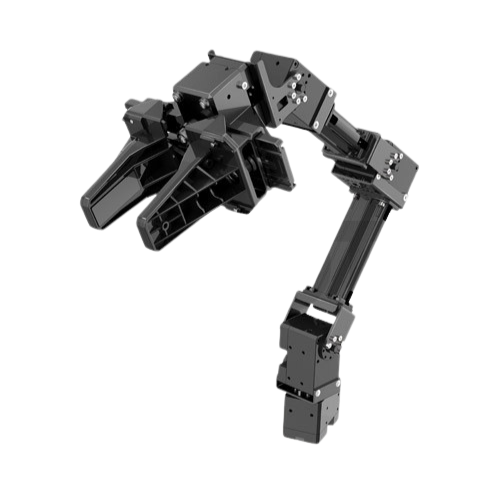
- Tiene una alta carga útil ya que se aplica el modelo DYNAMIXEL XM-430.
- Fácil de usar con PC o plataforma móvil como TB3 Waffle Pi.
- Proporciona código fuente y entorno de desarrollo que le ayuda a operarlo inmediatamente con TB3 Waffle Pi
- Puede seleccionar y utilizar libremente el PC o el controlador, p. AbiertoCR.
- Proporciona una variedad de software de código abierto, así como dibujos 3D y datos CAD para investigación y desarrollo.
Componentes del paquete

| XM430-W350-T | 5 |
| Conjunto exclusivo de marco de plástico | 1 |
| FR12-H101K | 2 |
| FR12-H104K | 1 |
| FR12-S101K | 1 |
| FR12-S102K | 2 |
| HN12-I101 Set | 3 |
| Juego de cables para robot X3P (por longitud) | 5 |
| Juego de pernos y tuercas | 1 |
| Almohadilla de goma (punta del dedo) | 2 tipos x 2 |
| Destornillador Phillips | 1 |
| Llave Allen (por tipo) | 3 |
Especificaciones
| DINAMIXEL | XM430-W350-T |
| Fuente de alimentación (se vende por separado) | 12V |
| Libertad de grado | 5 (pinza 4DOF + 1DOF) |
| Carga Útil | 500g |
| RPM (junta) | 46RPM |
| Peso (montaje) | 700g |
| Longitud | 380mm |
| Carrera de pinza | 20~75mm |
| Interfaz | TTL Level Multi Drop BUS |
| Software | ROS. DYNAMIXEL SDK Arduino Processing |
| Controlador (se vende por separado) | PC OpenCR |

Valoraciones
No hay valoraciones aún.