


Descripción
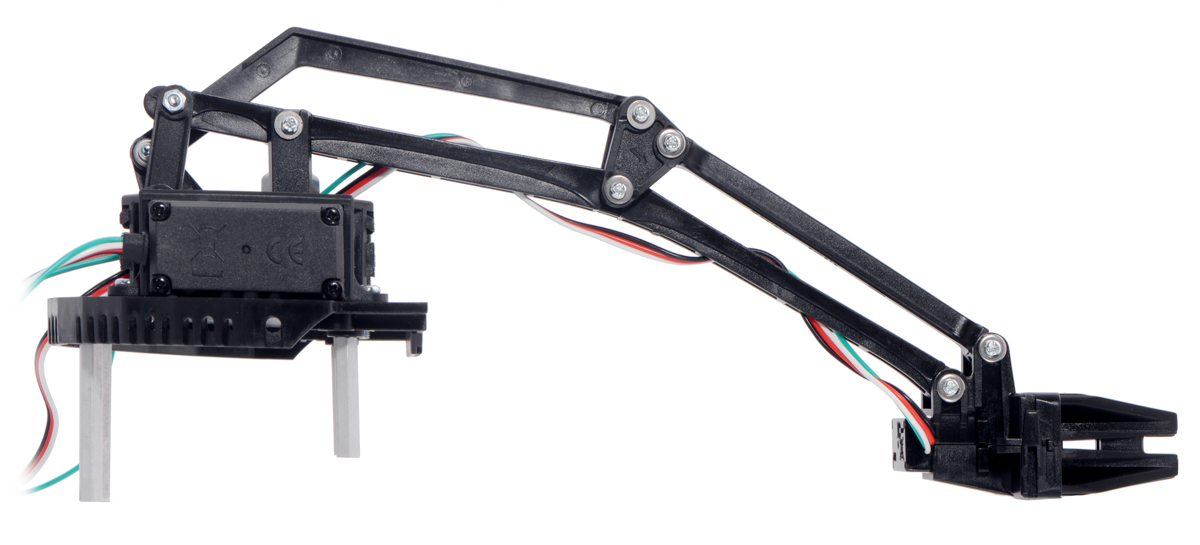
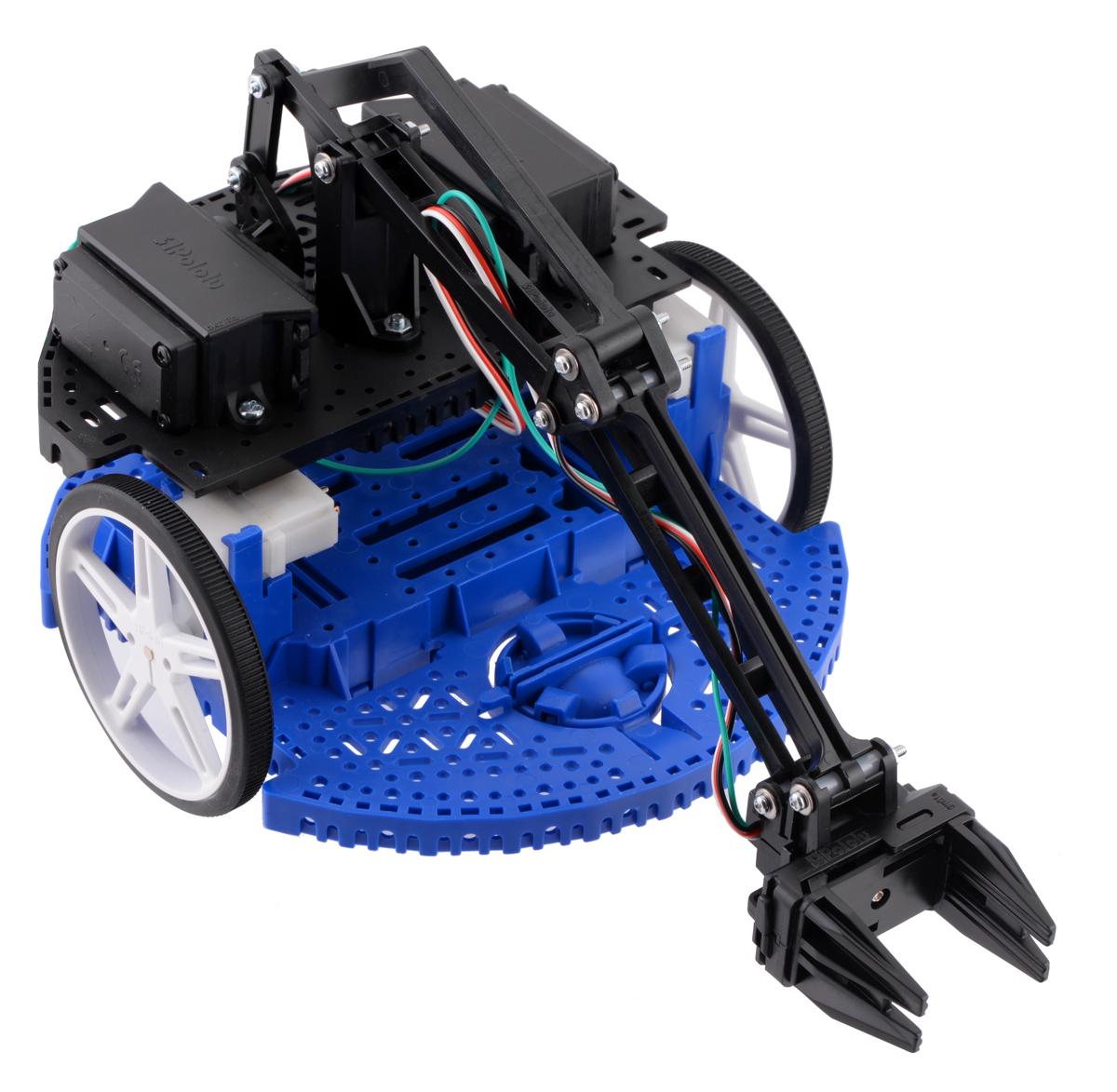
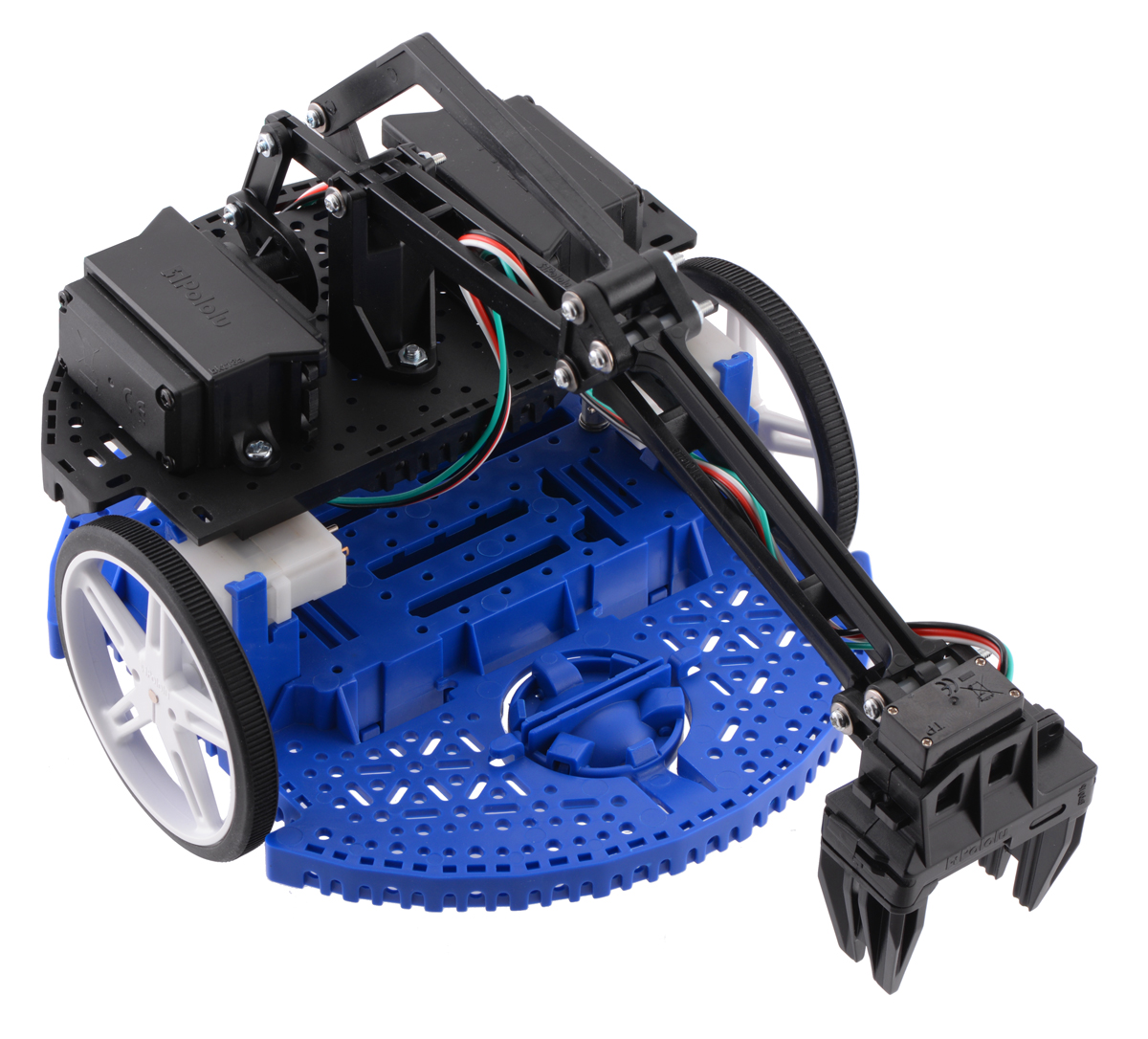
¡Empodere a su robot Romi para manipular su entorno con este kit de accesorios de brazo robótico! El kit contiene todo lo que necesita para construir el brazo, incluida una micro pinza y tres servos — uno para controlar la altura del brazo, uno para controlar la inclinación de la pinza, y uno para accionar las paletas de agarre. Los tres servos están especialmente modificados para proporcionar acceso a sus potenciómetros de retroalimentación, lo que permite un control de circuito cerrado de nivel superior de las tres articulaciones.
Resumen
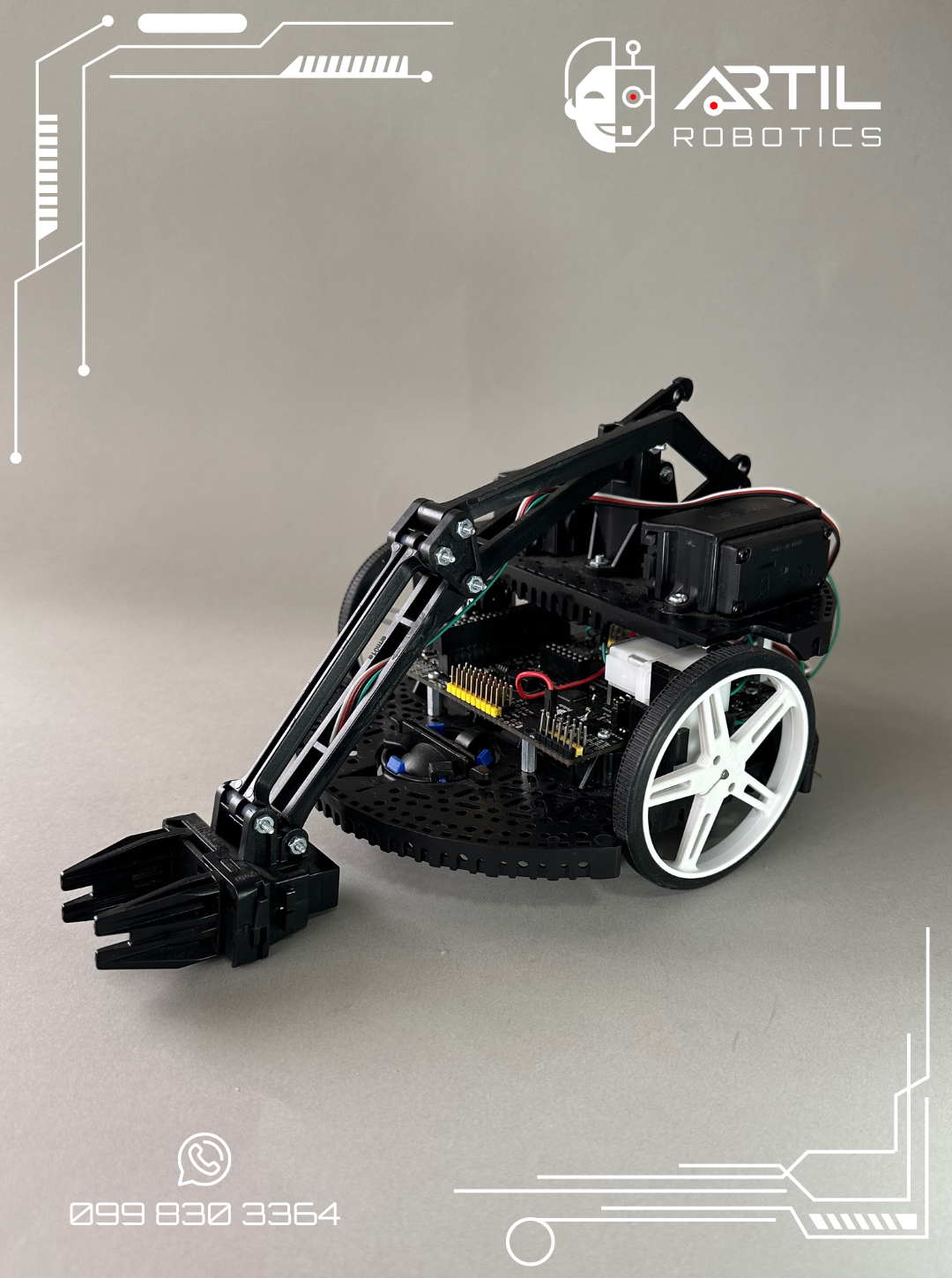
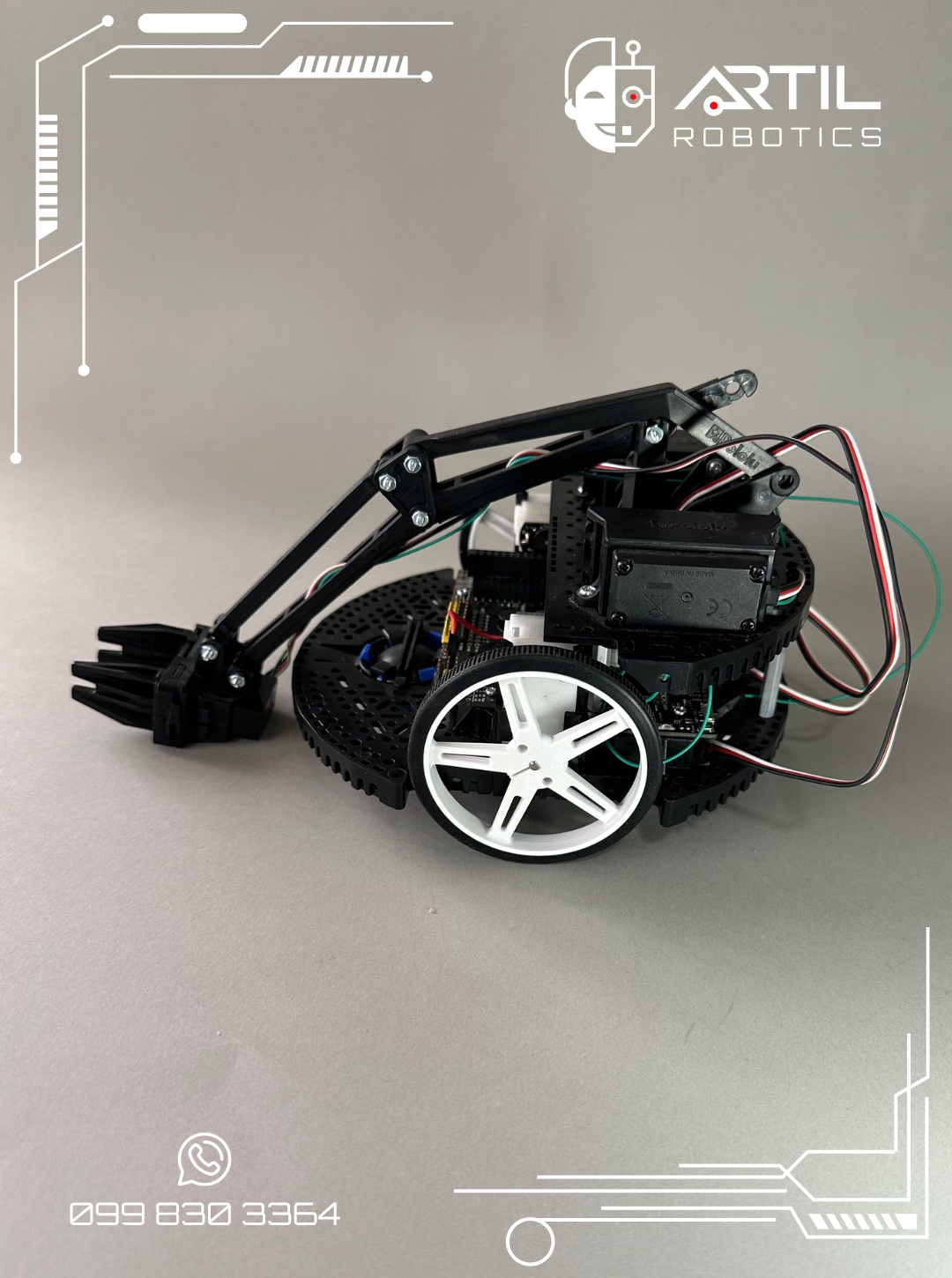
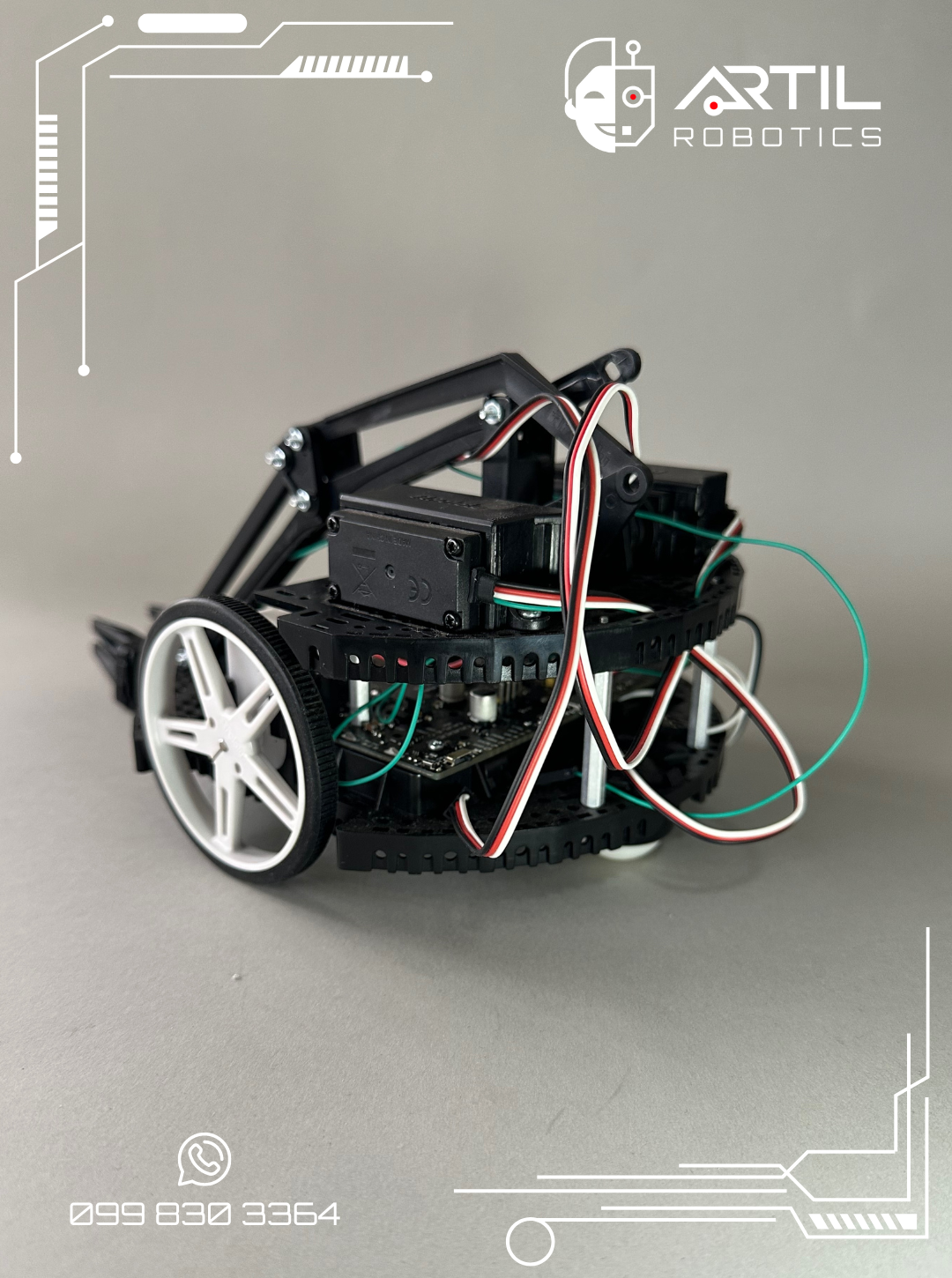
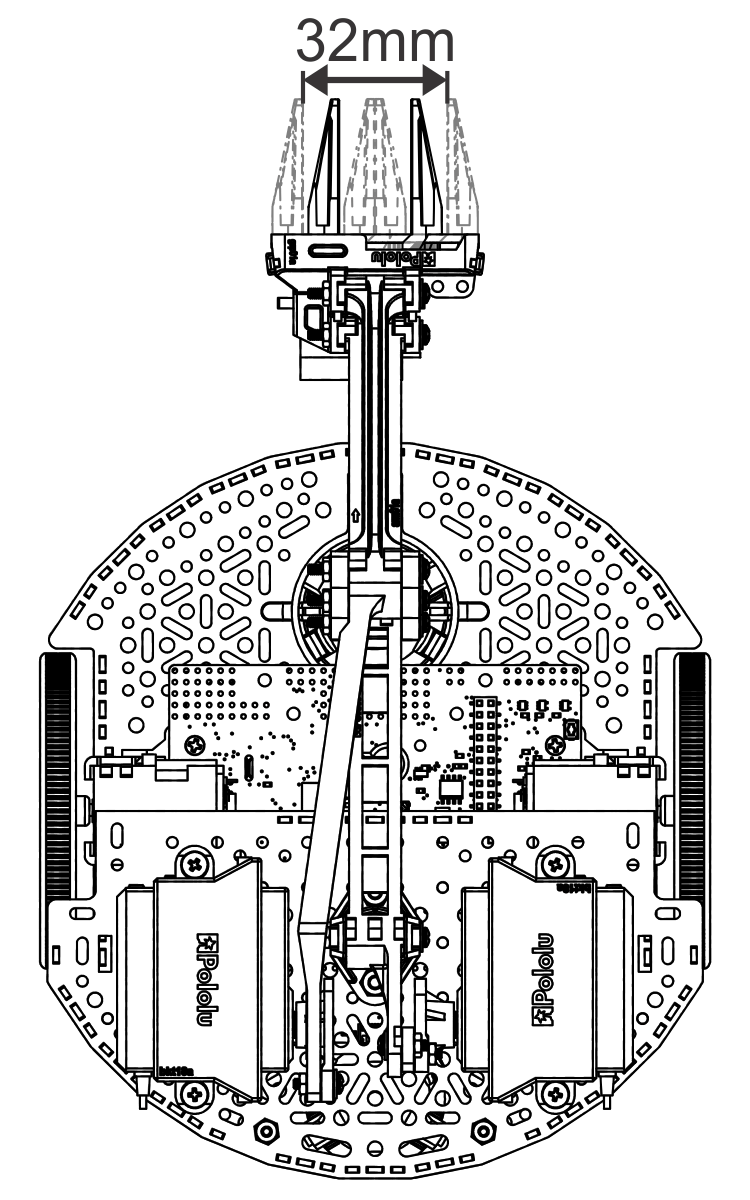
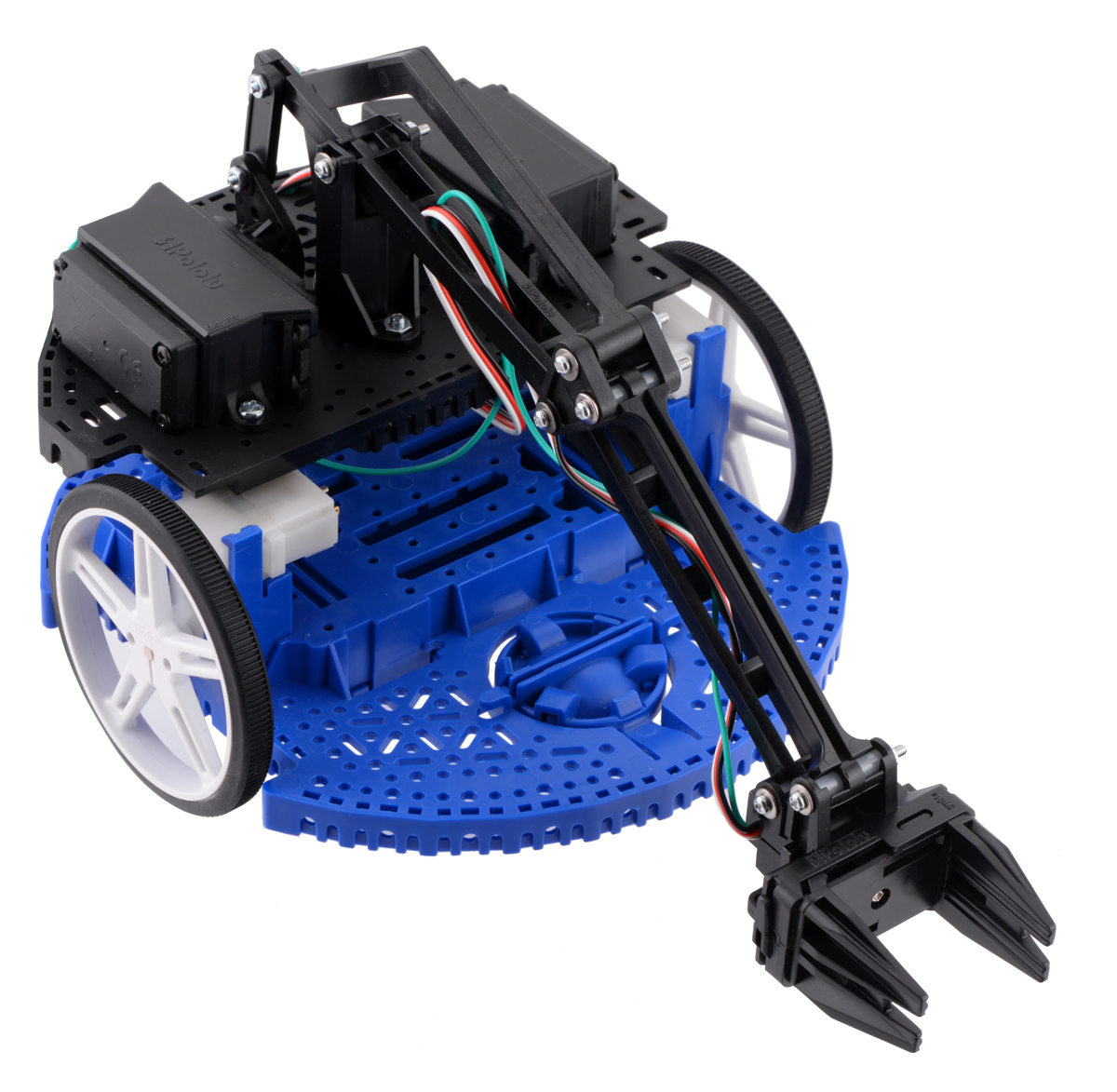
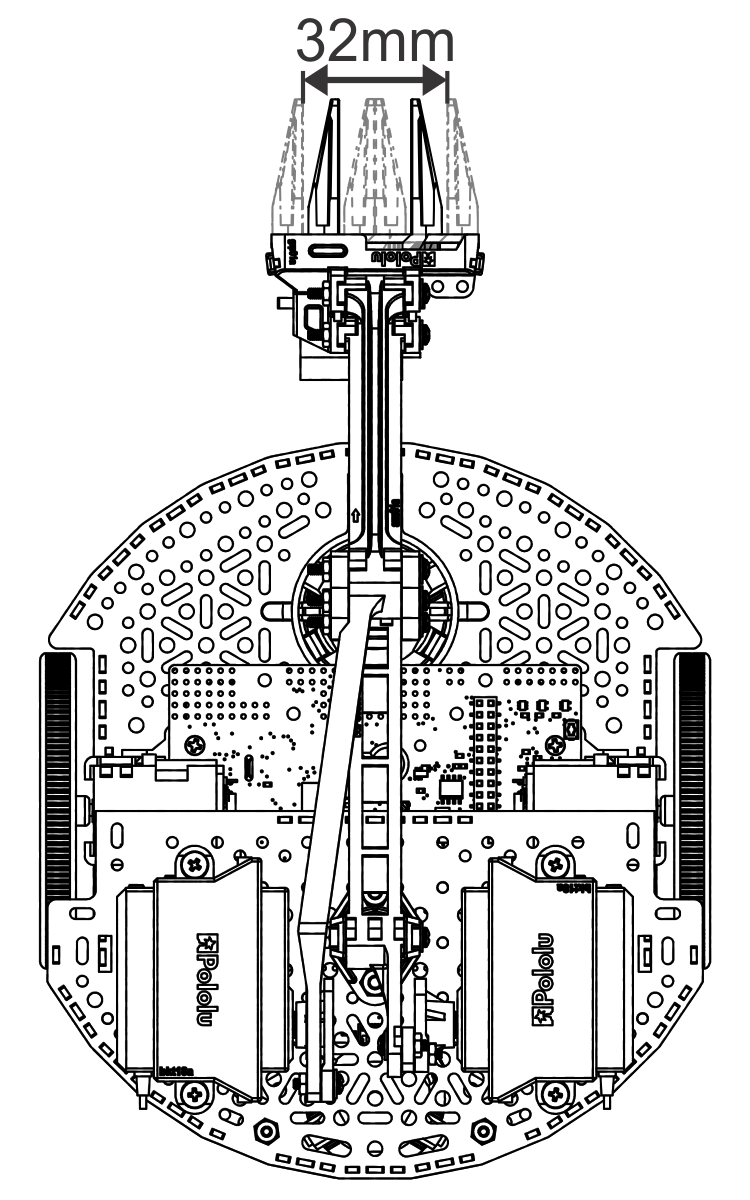
Este kit de brazo de robot es un accesorio para el Romi Chassis eso le permite manipular pequeños objetos a su alrededor. El kit incluye un micro agarre con paletas que pueden deslizarse hasta 32 mm de distancia, enlaces de brazos para soportar la pinza y una plataforma para montar todo. El ensamblaje está accionado por tres servos incluidos que están especialmente modificados para proporcionar acceso a sus potenciómetros de retroalimentación a través de un cuarto cable ( verde ), lo que le permite detectar si algo está interfiriendo con su capacidad de llegar a sus posiciones ordenadas. Esta retroalimentación también permite un control más complejo del brazo en circuito cerrado desde su controlador principal.
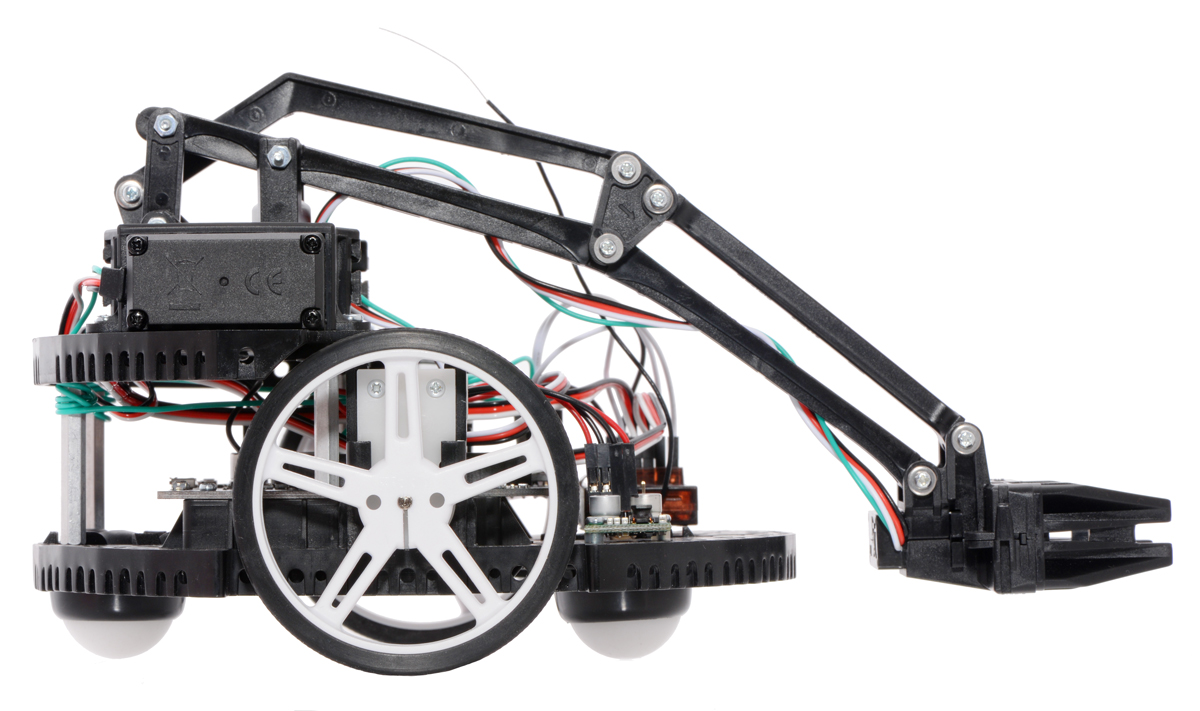 |
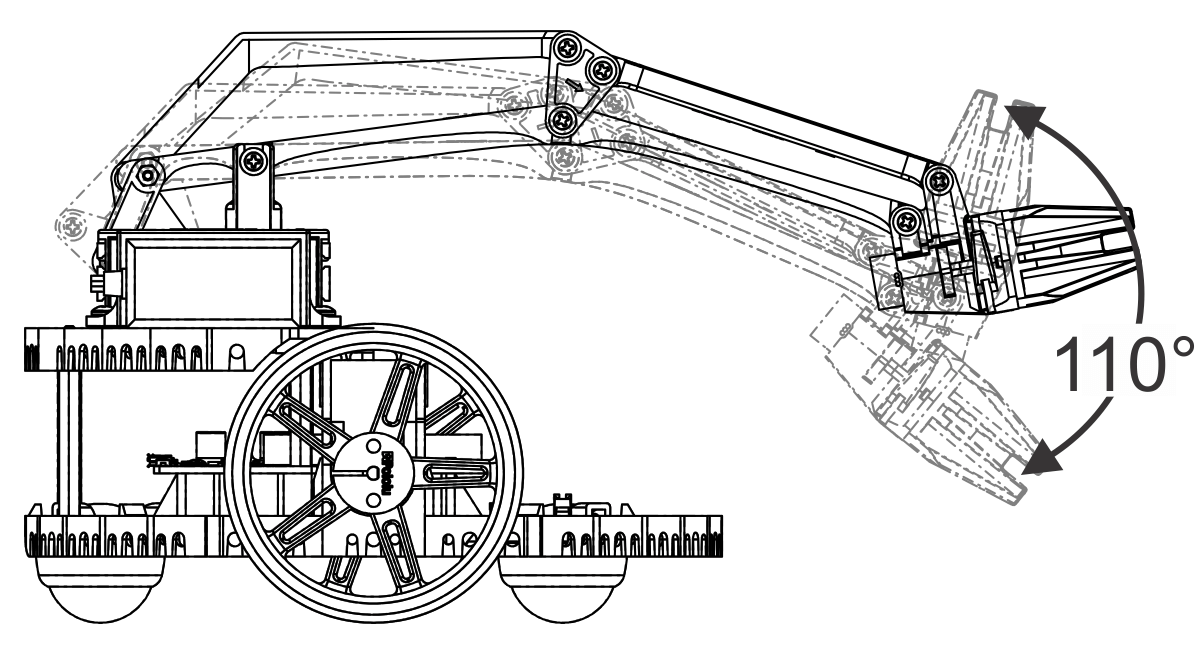
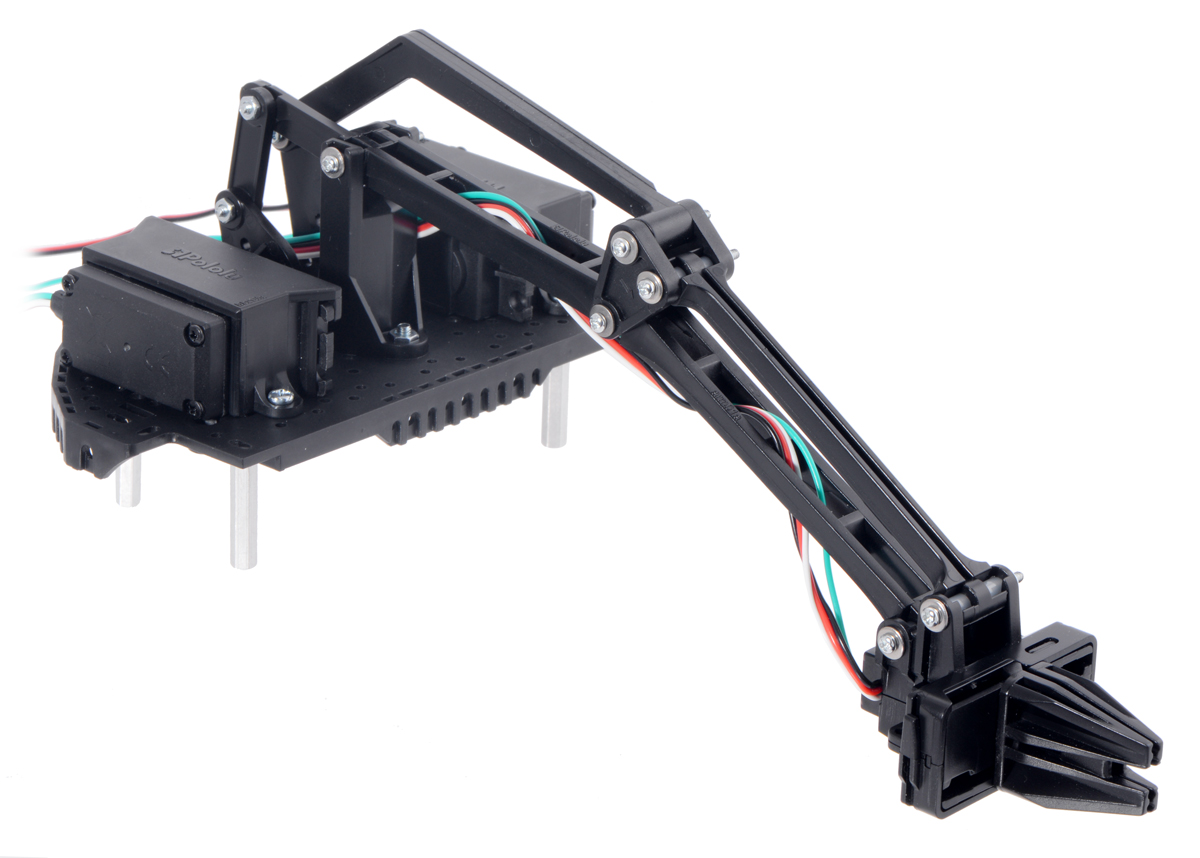
El brazo Romi se monta en la mitad trasera del chasis Romi, justo por encima de los motores, utilizando los separadores de aluminio incluidos. Dos servos de tamaño estándar se sientan en la base del brazo y controlan la altura y el ángulo de inclinación de la micro pinza, mientras que un micro servo se aloja dentro de la pinza para accionar las paletas ellos mismos. Los servos de elevación e inclinación más grandes pueden dibujar brevemente hasta alrededor de 1.8 A cada uno cuando se les ordena moverse abruptamente, pero el sorteo actual típico debe estar debajo de un amplificador cada uno. La corriente de pérdida del servo micro pinza es de aproximadamente 0.8 A a 6 V. Los tres servos están destinados a funcionar con baterías nominales de 4.8 V a 6 V ( ) o una fuente de alimentación adecuada en ese rango general. Para cada servo, hay una correspondencia de aproximadamente 1: 1 entre la posición del servo en milisegundos y el voltaje de retroalimentación en milivoltios, por ejemplo,el voltaje de retroalimentación será de alrededor de 1.5 V en la posición correspondiente a los servo pulsos de 1.5 ms.
|
|
|
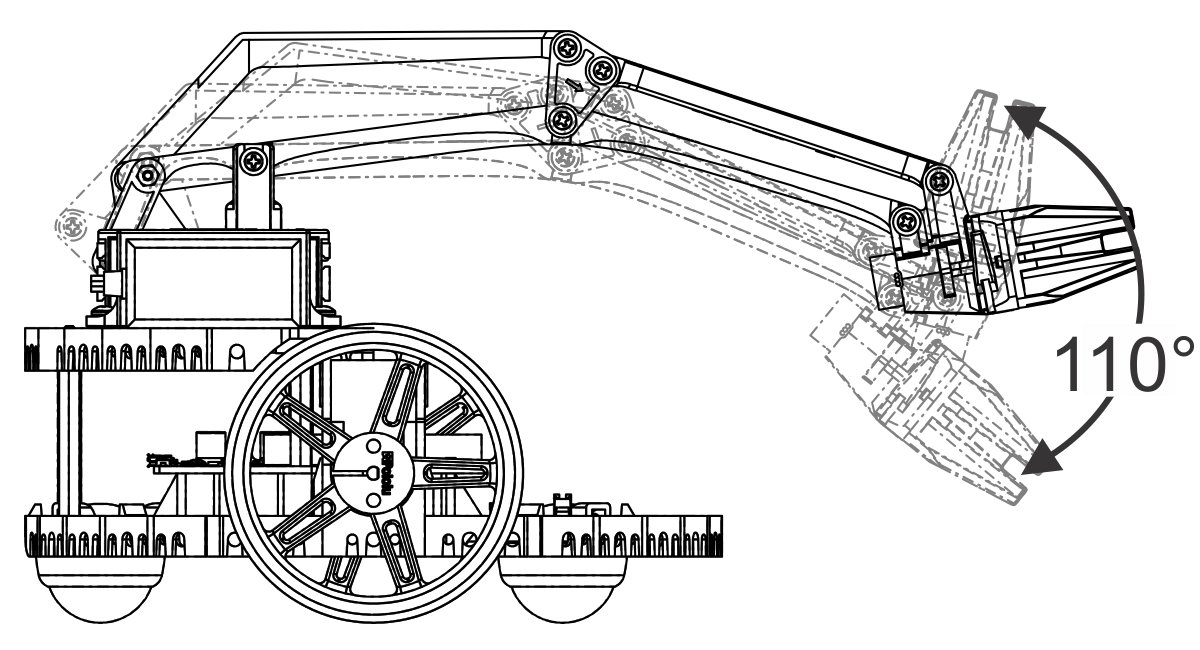
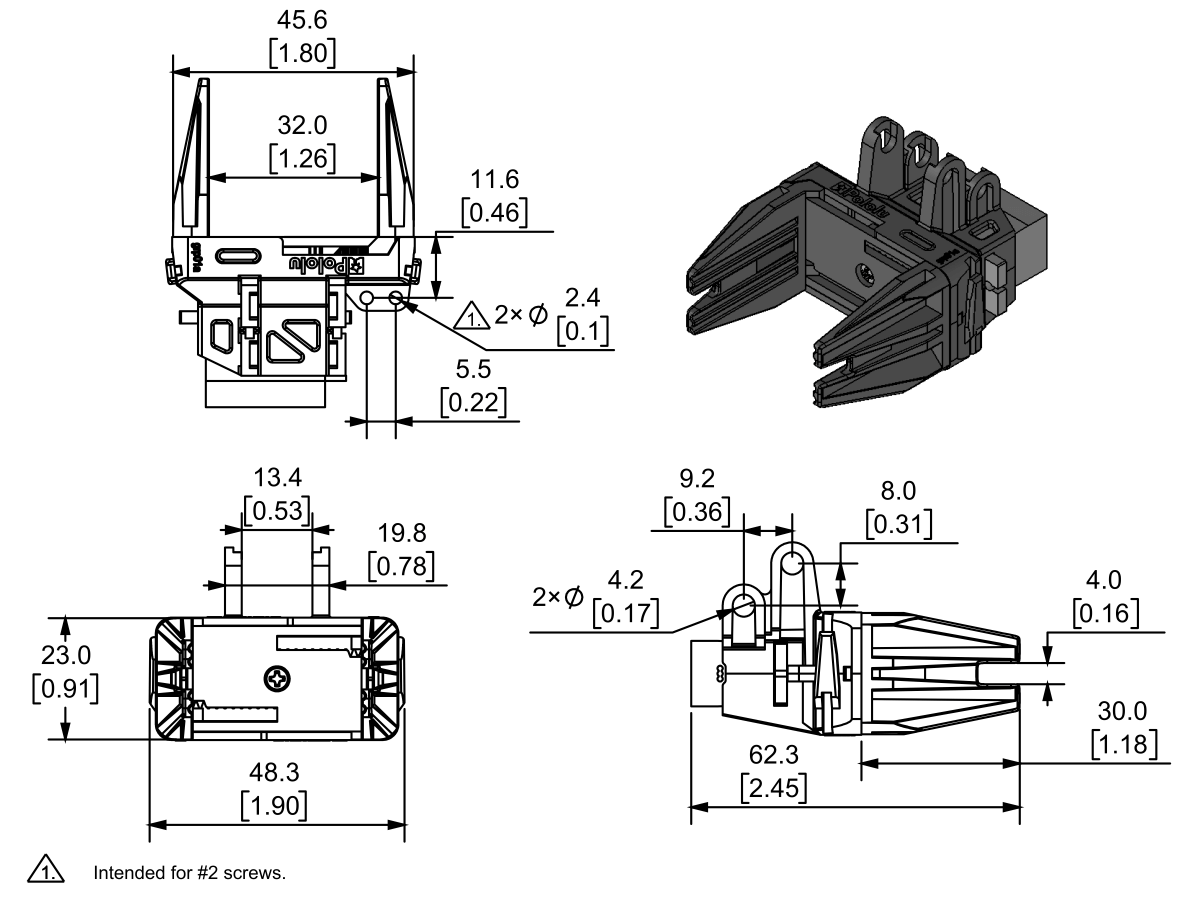
La pinza, que se puede montar hasta el final del brazo en una orientación horizontal ( scoop ) o vertical ( grúa ), utiliza un diseño de cremallera y piñón con el engranaje de piñón montado en la línea de servo y bastidores opuestos para mantener las paletas de agarre sincronizadas y paralelas entre sí en todo el rango de movimiento.
|
|
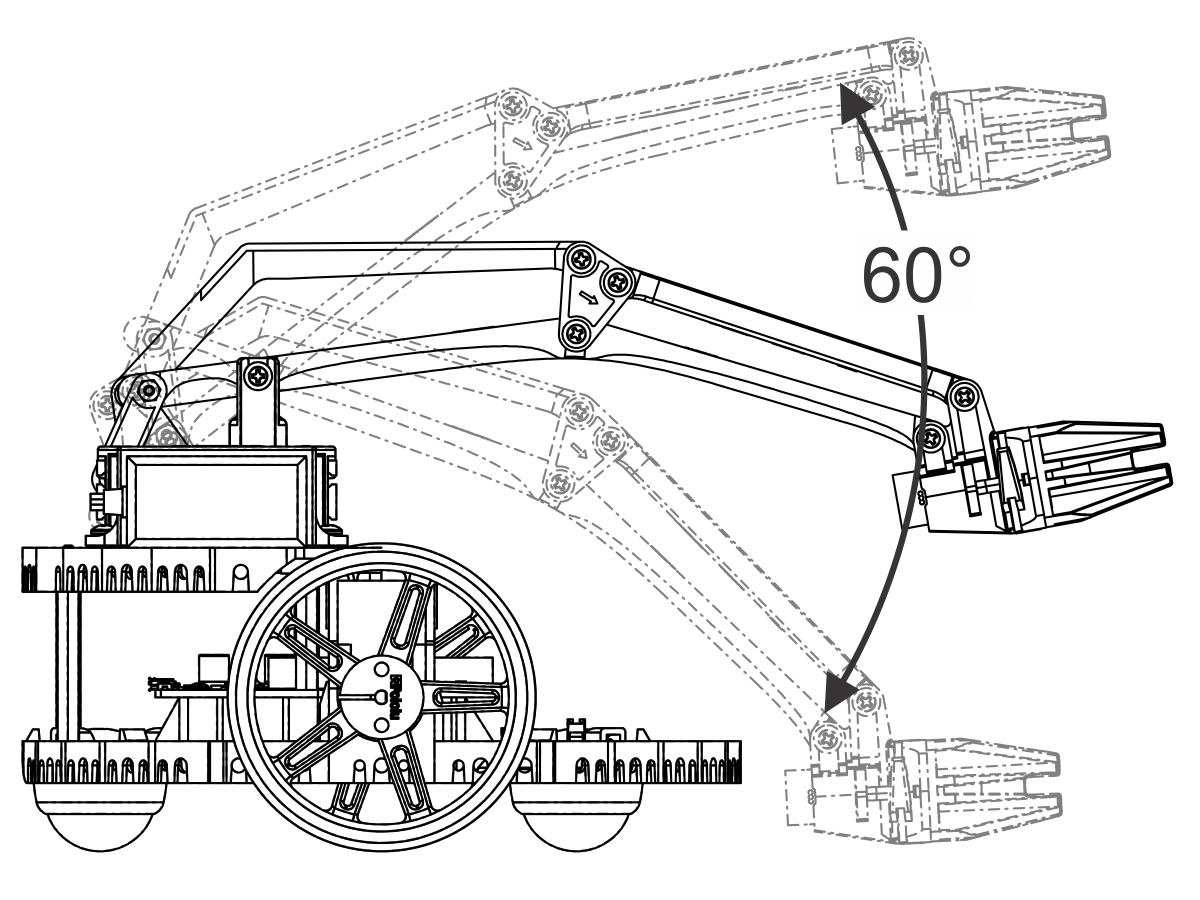
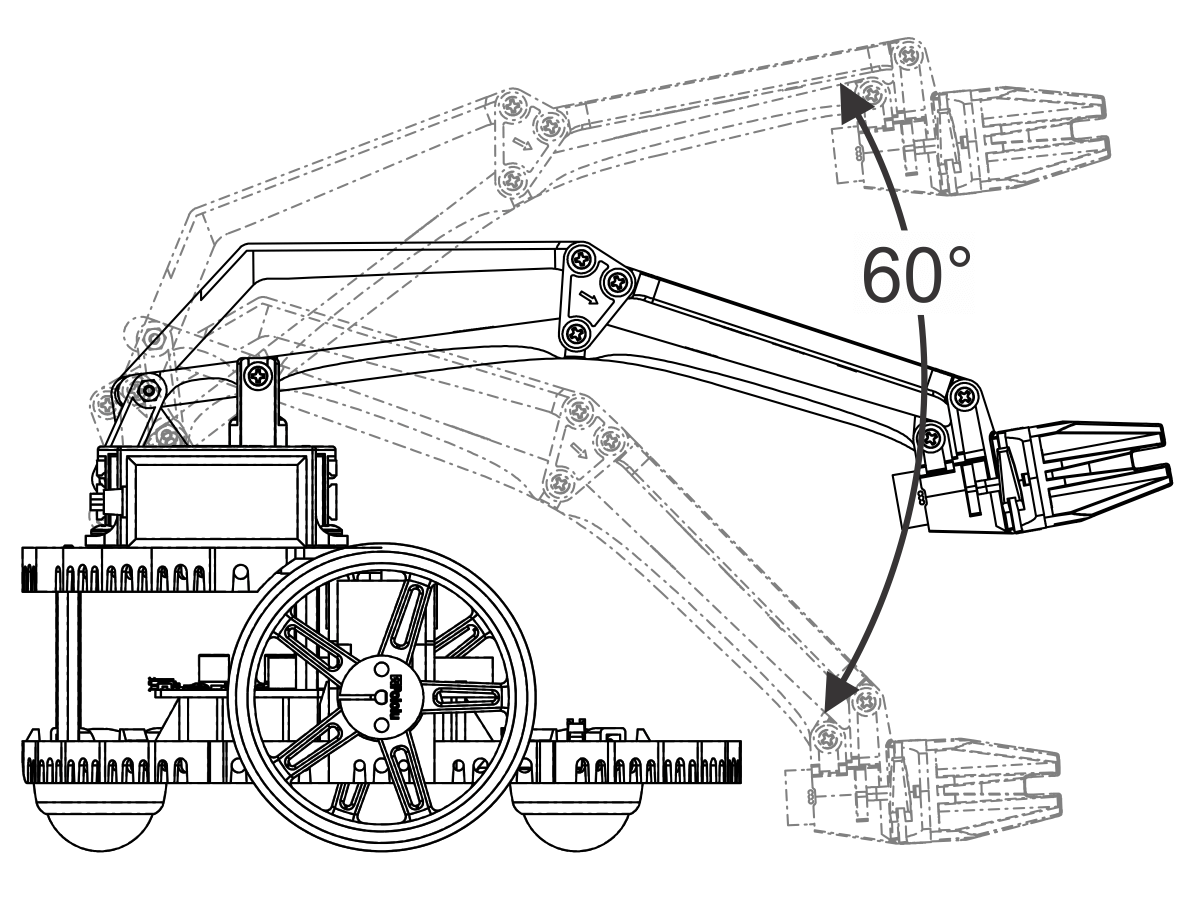
La carga útil máxima recomendada del brazo es de 3.5 oz ( 100 g ), y la pinza puede abrirse a un ancho máximo de 32 mm. Tenga en cuenta que el rango completo de movimiento del servo de la pinza requiere pulsos entre 0.5 ms ( completamente abiertos ) a 2.4 ms ( completamente cerrados ), que mucho más allá del rango de servo de pasatiempo estándar de 1 ms a 2 ms, por lo tanto, debe asegurarse de que su electrónica de control sea capaz de generar tales señales si le importa obtener el rango completo.
 |
Nota: Aunque la mayor parte del peso del brazo está colocado en la parte posterior del chasis, los objetos de elevación generalmente harán que el Romi se incline hacia adelante, por lo que recomendamos agregar un segundo lanzador de bolas al lugar opcional de lanzamiento de bolas en la parte delantera del Romi. Puede usar una banda elástica para endurecer la suspensión de esta rueda de bolas si lo desea (, consulte la guía del usuario para obtener más información ). Para obtener instrucciones de montaje y más detalles sobre el uso del brazo del robot para el Romi, consulte el Robot Arm para la guía del usuario de Romi
Estamos trabajando en electrónica para simplificar la integración de este brazo en su robot Romi, pero no queríamos que eso resistiera liberar el brazo para usuarios ambiciosos con las habilidades para ensamblar sus propios dispositivos electrónicos para alimentar y controlar el brazo. Por ahora, este accesorio está destinado a usuarios avanzados.
Contenido del kit
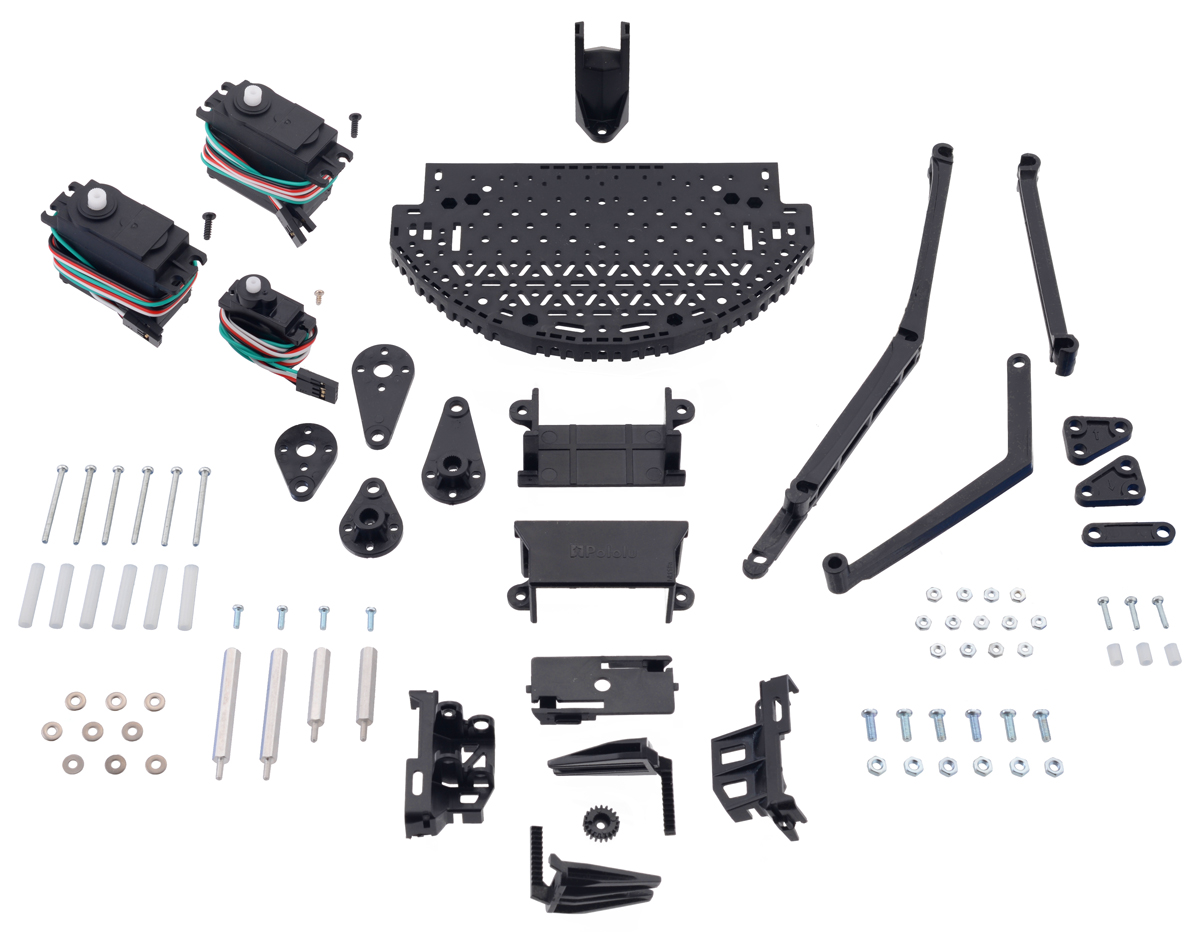 |
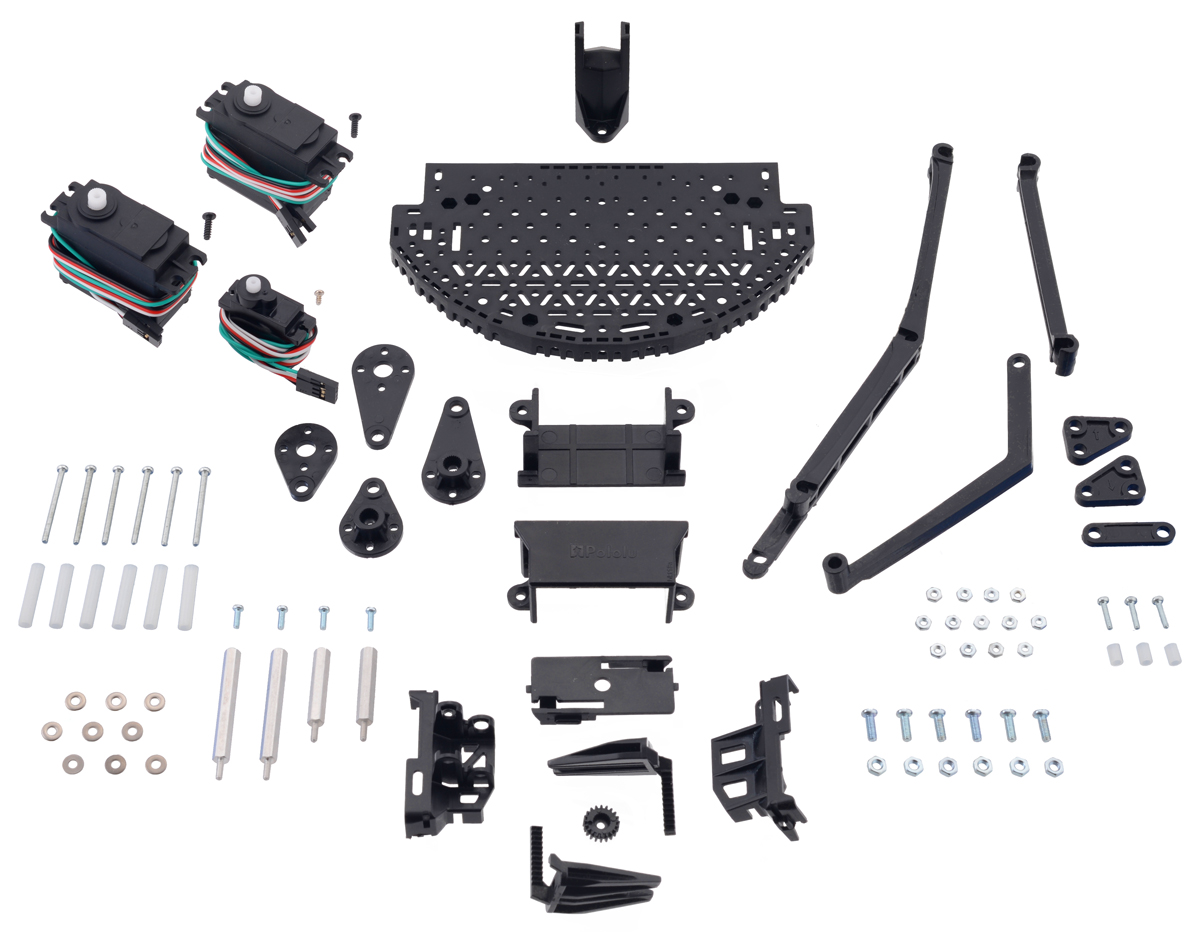
- uno Micro Gripper con servo de retroalimentación de posición
- Un micro servo con retroalimentación de posición
- Una caja superior de micro pinza
- Una caja de micro pinza inferior
- Una placa de micro agarre
- Un engranaje de piñón micro pinza
- Dos paletas micro agarre con estante
- uno Plataforma de expansión Romi
- Un brazo principal
- Un brazo de inclinación trasera
- Un brazo de inclinación frontal
- Un soporte de pivote
- Dos servo soportes de montaje
- Un enlace corto
- Dos enlaces de transferencia de pivote
- Un servo cuerno de inclinación
- Un servo cuerno de elevación
- Un accesorio alternativo de bocina de servo de inclinación
- Un accesorio alternativo de bocina del servo de vida
- Dos servos de tamaño estándar con retroalimentación de posición
- Seis Espaciadores de nylon de 20 mm, 4 mm OD, 2.7 mm ID
- Tres Espaciadores de nylon de 6 mm, 4 mm OD, 2.7 mm ID
- Dos Destaques de aluminio de 1.5 ″, rosca # 2-56, M-F
- Dos Destaques de aluminio de 1 ″, rosca # 2-56, M-F
- Seis 1 ″ # 2-56 Tornillos de máquina
- Tres Tornillos de máquina 3/8 ″ # 2-56
- Cuatro Tornillos de máquina 1/4 ″ # 2-56
- Trece #2-56 nueces hexagonales
- Nueve arandelas # 2
- Seis Tornillos de máquina M3 de 8 mm
- Seis Nueces hexagonales M3


Valoraciones
No hay valoraciones aún.