Descripción
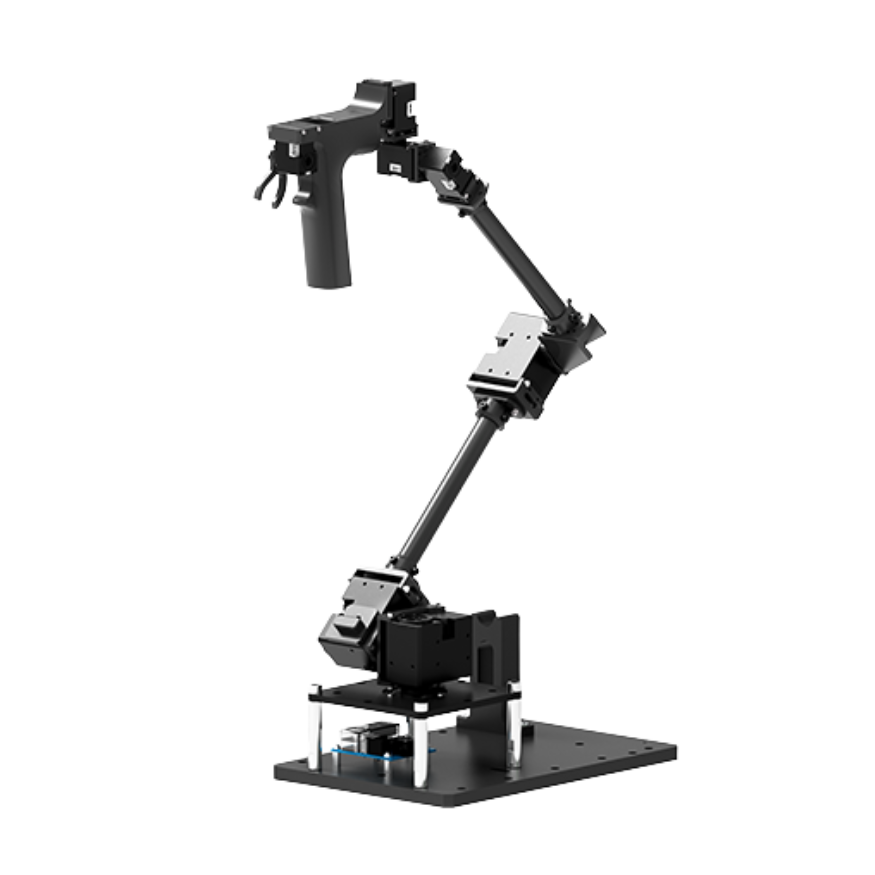
El OMY-L100 actúa como el dispositivo líder en el sistema de teleoperación OMY, diseñado específicamente para el aprendizaje por imitación y el control robótico avanzado con humano en el bucle (human-in-the-loop). Su diseño ligero y ergonómico proporciona una entrada intuitiva de 6 grados de libertad (6-DOF), lo que permite a los operadores replicar de forma natural los movimientos de brazos y manos para guiar al robot en tiempo real.
Al capturar datos de movimiento de alta resolución y transmitirlos con una latencia mínima a través de Ethernet, el OMY-L100 garantiza un control preciso y de respuesta rápida del brazo seguidor OMY-F3M. Optimizado para la comodidad y la precisión, es la herramienta ideal para entrenar sistemas de IA en tareas de manipulación complejas a través de una arquitectura de control maestro-esclavo.

Especificaciones
| Grados de Libertad | 6 |
| Alcance | 580 mm |
| Peso | 1.46 kg |
| Voltaje de Operación | 12 VDC |
| Resolución Articular | -π(rad) ~ π(rad) -2,048 ~ 2,048 pulsos/rev |
| Rango Articular | Art. 1: ±180° Art. 2: -70° ~ +100° Art. 3, 4, 5, 6: ±180° Art. 7: -90° ~ +60° |
| Especificación DYNAMIXEL-Y | Art. 1, 2, 3: XH540-W150-T Art. 4, 5, 6: XC330-T288-T Art. 7: XC330-T181-T |
| Interfaz Host | U2D2 (USB 2.0) |
| Comunicaciones Internas | Bus TTL Multidrop |
| Tasa de Baudios de Comunicación | 4 Mbps |

Valoraciones
No hay valoraciones aún.