Descripción
Especificaciones
| Peso | Aproximadamente 1070 g (incluida la batería) | |
|---|---|---|
| Tamaño | 182mm (alto) × 335mm (ancho) × 223mm(profundidad) (en punto muerto) | |
| Sistema Operativo |
|
|
| Contenido |
|
|
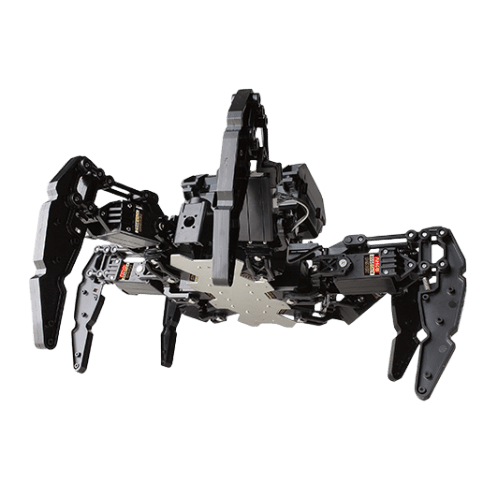
Excelente estabilidad con 6 patas

Los robots de seis patas pueden moverse en una variedad de lugares en comparación con los robots bípedos. El KMR-M6 caminará sobre zonas que antes eran difíciles de cruzar, como ligeros desniveles y adherencia en la superficie de la carretera.
Ligero y duradero + Equipado con un mecanismo de absorción de impactos en las piernas

El peso total se ha reducido mediante el uso de piezas de resina ligeras con excelente resistencia al impacto. Además, las partes de las piernas tienen resortes incorporados que reducen los golpes y permiten un movimiento ágil y libre.
Adopta patas tipo enlace y un potente servo

El mecanismo de enlace permite el libre movimiento con una pequeña cantidad de servos. Además, al adoptar el mismo servo KRS-2552R2HV que el KHR-3HV Ver.3, es posible una ejecución de movimiento potente y rápida.
También es posible ampliar la parte del cuerpo

El cabezal también se puede mover reemplazando el cabezal simulado por un servo serie KRS-2500 (se vende por separado).
Adopta una placa RCB-4HV totalmente compatible con serie
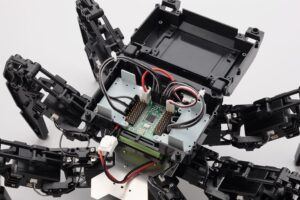
El cuadro de control, que hereda la trayectoria y fiabilidad de la serie KHR, está equipado con 10 terminales analógicos y 10 E/S digitales. Además, se pueden controlar módulos compatibles con ICS 3.5/3.6.
Creación de movimiento intuitiva exclusiva de HeartToHeart4
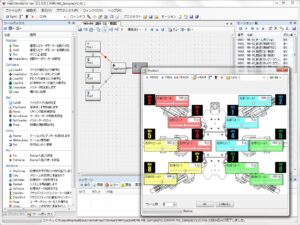
El software de creación de movimientos gráfico y fácil de usar cubre una amplia gama de usuarios, desde principiantes hasta expertos. También se puede utilizar la función de enseñanza.
Puede realizar la mayor parte del trabajo simplemente usando el mouse, desde crear movimientos hasta escribir y administrar datos.
El robot de la imagen está equipado con un ROBO Power Cell tipo D (níquel hidruro metálico (Ni-MH)), pero este conjunto viene con un ROBO Power Cell F3-850 (ferrita de litio (Li-Fe)).

Cambios a la versión 3
El servo ha evolucionado
Anteriormente, se usaba un servomotor ICS3.5, pero a partir de la versión 3 se cambió a KRS-2552R2HV, que es compatible con ICS3.6. ICS3.6 agrega un comando para obtener el valor actual.
Para conocer las funciones detalladas de ICS3.5, consulte la página de soporte «Introducción a las diferencias y nuevas funciones entre ICS3.6 y 3.5».
Valor inicial de velocidad de comunicación servo: 115200bps
Cuando se utiliza RCB4+HTH4
Aunque la versión ICS se ha actualizado, los movimientos del KMR-M6 Ver.2 y anteriores se pueden utilizar tal cual porque los servos son compatibles.
Cuando utilice una placa de microcomputadora disponible comercialmente para ejecutar el robot con su propio programa
Con ICS3.6, ahora es posible obtener ángulos sin utilizar comandos de posición, por lo que ahora se pueden obtener ángulos en cualquier momento. Al poder obtener el ángulo durante el movimiento, ahora es más fácil obtener la postura actual con mayor precisión.
Cambiado a cable de servo negro suave y duradero
Cable de servo negro recién adoptado. Dado que está hecho de un material blando, es menos probable que interfiera con el funcionamiento del robot y es menos probable que se rompa debido a movimientos repetidos.



Valoraciones
No hay valoraciones aún.