Descripción
Operable por una sola persona
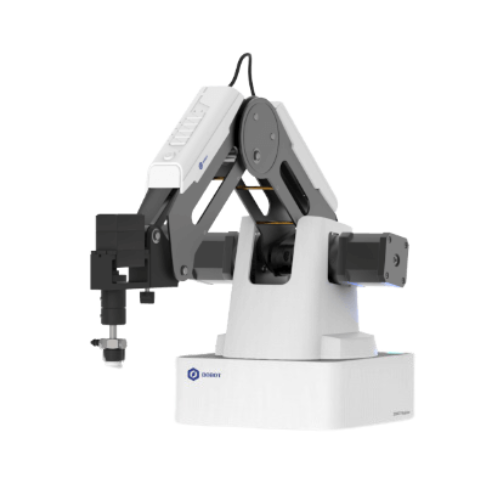
The Magician está diseñado pensando en estudiantes y consumidores. Es extremadamente portátil y capaz de realizar diversas tareas de automatización. Los usuarios pueden interactuar con el Mago usando botones de comando de acceso rápido o de forma inalámbrica con dispositivos informáticos portátiles.
Enseñar físicamente al robot
El Mago es capaz de arrastrar para enseñar. Simplemente moviendo el brazo robótico por las rutas deseadas para programarlo. Es así de simple.
Alta capacidad de expansión con desarrollo secundario
El Mago tiene 13 puertos de interfaz y conectividad inalámbrica para desarrollo secundario. La compatibilidad con el controlador está disponible para principiantes.
Amplia selección de accesorios
Una amplia variedad de accesorios, como pinzas, rieles, cintas transportadoras, módulos de movilidad y visión, están disponibles para permitir al Mago completar diferentes tareas.
Especificaciones
| Número de eje | 4 |
| Carga útil | 500 g |
| Alcance Máximo | 320 mm |
| Repetibilidad | ±0.2 mm |
| Comunicación | USB / Wi-Fi* / Bluetooth* |
| Fuente de alimentación | 100V – 240V, 50/60 HZ |
| Alimentación en | 12V / 6.5A DC |
| Consumo | 78W Max |
| Temperatura de trabajo | -10° – 60° C |
Movimiento de los ejes
| Ejes | Rango | Velocidad máxima (carga de trabajo de 250 g) |
| Junta 1 base | -120° ~+120° | 320° / s |
| Articulación 2 brazo trasero | -5°~+90° | 320° / s |
| Articulación 3 antebrazo | -15°~+90° | 320° / s |
| Servo de rotación de 4 articulaciones | -140°~+140° | 480° / s |
Físico
| Peso neto | 3.4 Kg |
| Peso bruto (versión estándar) | 7.2 Kg |
| Peso bruto (versión educativa) | 8.0 Kg |
| Dimensión de la base (huella) | 158 mm × 158 mm |
| Materiales | Aleación de aluminio 6061, plástico de ingeniería ABS |
| Controlador | Controlador integrado Dobot |
| Montaje de robot | Escritorio |
| Tamaño del embalaje (largo × ancho × alto) | 421 mm x 334 mm x 352 mm |
Aplicaciones
| Software | DobotLab, DobotStudio, Repetier Host, GrblController3.6, DobotBlockly (Editor de programación visual) |
| SDK ( Kit de desarrollo de software ) | Protocolo de comunicación, biblioteca de programas Dobot |
| Interfaces I/O extensibles | 1. I/O × 10 (configurables como entrada analógica o salida PWM) |
| 2. Salida de potencia controlable de 12 V × 4 | |
| 3. Interfaz de comunicación (UART, Reset, Stop, 12V, 5V and dos I/O incluidas) | |
| 4. Paso a paso × 2 |
Efectores finales
| Kit de impresora 3D | Tamaño máximo de impresión (largo × ancho × alto) | 150 mm ×150 mm × 150 mm |
| Material de impresión 3D | PLA | |
| Resolución | 0.1 mm | |
| Láser* | Consumo de energía | 500 mw |
| Tipo | 405 nm (láser azul) | |
| Alimentación | 12V , disparador TTL (con controlador PWM) | |
| Portalápices | Diámetro del bolígrafo | 10 mm |
| Ventosa de vacío | Diámetro de la ventosa | 20 mm |
| Presión | -35 Kpa | |
| Pinza | Rango | 27.5 mm |
| Tipo de accionamiento | Neumático | |
| Fuerza | 8 N | |
| Los elementos marcados con son kits opcionales, no incluidos en el paquete predeterminado. | ||
Plan y lista de envío



Valoraciones
No hay valoraciones aún.