
Descripción
Características Clave del Brazo NERO
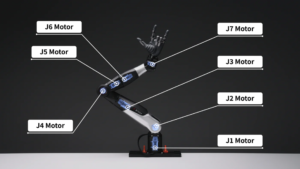
Control de Movimiento Antropomórfico (Human-Like)
NERO utiliza un diseño de brazo de 7 Grados de Libertad (DoF) que ofrece movimientos fluidos y naturales. Es ideal para la investigación en Inteligencia Artificial Corporizada (Embodied AI) y robótica humanoide.
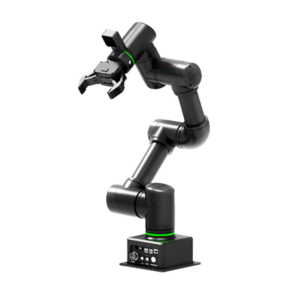
Ligero, Robusto y de Fácil Instalación
NERO pesa solo 4.8 kg y tiene una capacidad de carga de hasta 3 kg. Es compatible con cámaras, pinzas (grippers) y sensores. Permite múltiples configuraciones de montaje: sobre mesa, lateral o invertido.
Implementación Flexible y Control Integral
Ofrece control «Full-stack» a través de CAN/HTTP/TCP, además de modos de uso intuitivos: Enseñanza por arrastre (Drag-and-Teach), Trayectoria Offline y API. Es totalmente compatible con Python SDK y ROS1/ROS2, y se integra fácilmente con los chasis móviles de AgileX para crear una plataforma robótica completa.
Estabilidad y Precisión para Investigación
NERO proporciona una repetibilidad de ±0.1 mm, con un consumo energético inferior a 60W y niveles de ruido por debajo de los 60 decibelios. Esto lo hace perfecto para entornos de laboratorio, oficinas y plataformas de robots móviles.
Dato útil: Dado que estás trabajando con Python en tu proyecto del Dobot, la API de Python del PiPER te resultaría muy familiar, facilitando la portabilidad de scripts de control de movimiento entre ambos brazos.
Especificaciones
| Grados de Libertad | 6 |
| Carga útil | 3 KG |
| Peso | 4.8 KG |
| Repetibilidad | ±0.1 mm |
| Alcance | 580 mm |
| Voltaje de entrada | DC 24V |
| Material | Cuerpo de aleación de aluminio, carcasa de polímero |
| Comunicación | CAN-TCP-HTTP |
| Programación | Enseñanza por arrastre (Drag teaching) / trayectoria offline / API / PC |
| Interfaz Externa | Energía (Power) x1, CAN (Bus de comunicaciones) x1, USB x1, Network x1 |
| Dimensiones de instalación de la base | 70mm x 70mm, M5x4 |



Valoraciones
No hay valoraciones aún.